Introduction
Computer vision is entering a new era of integration and efficiency.
For years, vision systems have largely depended on two distinct approaches: object detection models that quickly locate and classify objects within an image, and segmentation models that provide detailed, pixel-level understanding of those objects. Each approach has proven highly effective in its own right, yet both come with inherent limitations when used independently in real-world applications that demand both speed and precision.
To bridge this gap, a new hybrid architecture has emerged: the combination of YOLO (You Only Look Once) and Segment Anything Model (SAM).
In this unified pipeline, YOLO delivers rapid and efficient object detection, while SAM provides highly accurate, pixel-level segmentation of the detected objects. Together, they form a complementary system that balances performance and precision.
This integration enables capabilities that were previously difficult to achieve simultaneously: real-time inference, fine-grained segmentation accuracy, optimized computational efficiency, and scalability across diverse deployment environments.
As of 2026, the YOLO + SAM hybrid is increasingly shifting from experimental research to practical adoption, positioning itself as a foundational architecture in modern computer vision systems across industries.
2. The Core Problem in Traditional Computer Vision
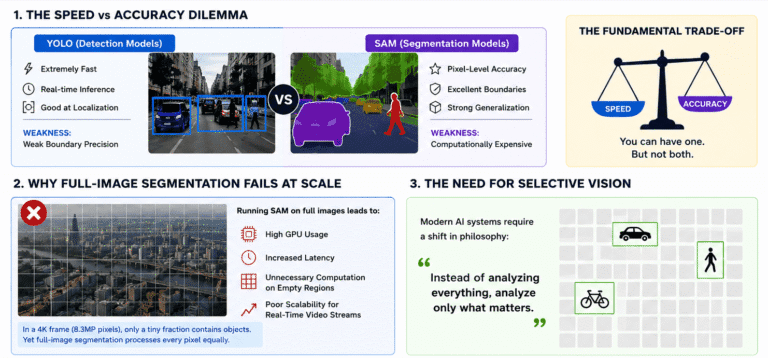
2.1 The Speed vs Accuracy Dilemma
Computer vision systems traditionally suffer from a fundamental trade-off:
| Model Type | Strength | Weakness |
|---|---|---|
| YOLO | Extremely fast inference | Weak segmentation precision |
| SAM | High-quality segmentation | High computational cost |
This creates a major problem:
- Fast models are not precise enough
- Precise models are not fast enough
In real-world systems such as autonomous driving or robotics, this trade-off is unacceptable.
2.2 Why Full-Image Segmentation is Inefficient
Running segmentation models like SAM on full images leads to:
- High GPU usage
- Increased latency
- Unnecessary computation on empty regions
- Poor scalability for real-time video streams
For example, in a 4K frame:
- Only a small fraction of pixels contain meaningful objects
- Yet full-image segmentation processes everything equally
This inefficiency becomes critical in production systems.
2.3 The Need for Selective Vision
Modern AI systems require a shift in philosophy:
Instead of analyzing everything, analyze only what matters.
This is the foundation of the SAM + YOLO hybrid pipeline.
3. What is the SAM + YOLO Hybrid Pipeline?
The SAM + YOLO pipeline is a two-stage computer vision architecture designed to combine real-time detection with high-precision segmentation.
3.1 Core Idea
The pipeline works as follows:
- YOLO detects objects in real time
- SAM refines only selected regions
- Outputs are merged into a structured scene representation
3.2 Why This Works
YOLO provides:
- Fast bounding box detection
- Class labels
- Real-time inference
SAM provides:
- Pixel-level segmentation
- Accurate object boundaries
- Robust generalization
Together, they form a balanced vision system.
3.3 Key Insight
Instead of asking:
“How do we segment everything perfectly?”
We ask:
“How do we segment only what is necessary?”
This shift dramatically reduces computational cost.
4. Architecture of the SAM + YOLO Pipeline
4.1 Step 1: Input Acquisition
The system receives input from:
- Cameras (CCTV, drones, vehicles)
- Medical scanners
- Industrial sensors
- Satellite imagery systems
Each frame is treated as a processing unit.
4.2 Step 2: YOLO Detection Stage
YOLO processes the image and outputs:
- Bounding boxes
- Object classes
- Confidence scores
Example:
- Person → 0.92 confidence
- Car → 0.89 confidence
- Bicycle → 0.78 confidence
This stage is extremely fast, often running in milliseconds.
4.3 Step 3: Region Filtering
Not all detections are processed further.
Filtering is based on:
- Confidence threshold
- Object priority
- Application-specific rules
This reduces unnecessary SAM calls.
4.4 Step 4: SAM Segmentation Stage
SAM is applied only to selected bounding boxes.
It generates:
- Pixel-level masks
- Object boundaries
- Refined segmentation maps
This is the most computationally expensive step—but now heavily optimized.
4.5 Step 5: Output Fusion
Final output includes:
- YOLO bounding boxes
- SAM masks
- Object metadata
- Spatial relationships
This creates a full scene understanding output.
5. Why the SAM + YOLO Pipeline is a Breakthrough
5.1 Massive Efficiency Improvement
Instead of segmenting full images, we only segment:
- Detected objects
- Relevant regions
This reduces computation significantly.
5.2 Real-Time Capability
YOLO ensures:
- Fast detection (real-time)
SAM ensures:
- High precision only where required
This makes real-time segmentation practical.
5.3 Scalability Across Systems
The pipeline works across:
- Cloud systems
- Edge devices
- Hybrid architectures
5.4 Better Performance in Complex Scenes
Especially effective in:
- Crowded environments
- Occlusions
- Overlapping objects
- Dynamic motion scenarios
6. Advanced Variants of the Pipeline
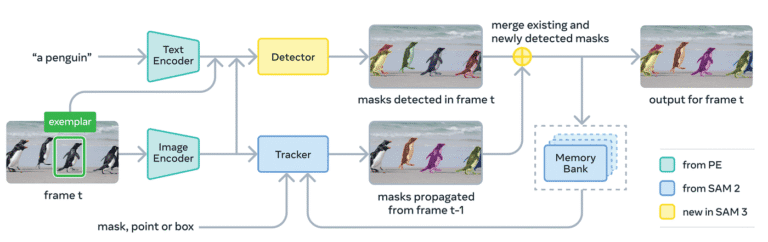
6.1 YOLO + SAM with Tracking
Used in video systems:
- Maintains object identity across frames
- Reduces repeated computation
- Improves temporal consistency
6.2 Prompt-Guided SAM
YOLO outputs are converted into SAM prompts:
- Bounding boxes
- Points
- Region proposals
This improves segmentation accuracy and speed.
6.3 Multi-Scale Detection Fusion
YOLO runs at multiple scales:
- Small objects
- Medium objects
- Large objects
Results are merged before segmentation.
6.4 Edge-Optimized Architectures
Designed for:
- Drones
- Mobile robots
- IoT devices
Uses:
- Lightweight YOLO variants
- Distilled SAM models
7. Real-World Applications
7.1 Autonomous Vehicles
- Real-time object detection
- Lane and obstacle segmentation
- Pedestrian boundary accuracy
7.2 Robotics
- Object grasping
- Industrial automation
- Navigation in dynamic environments
7.3 Medical Imaging
- Tumor detection
- Organ segmentation
- Diagnostic assistance
7.4 Smart Agriculture
- Crop monitoring
- Weed detection
- Yield estimation
7.5 Surveillance Systems
- Crowd monitoring
- Suspicious object detection
- Behavioral analysis
8. Optimization Strategies
8.1 Reducing SAM Calls
Only process:
- High-confidence detections
- Priority classes
8.2 Model Quantization
- Reduce model size
- Improve inference speed
- Maintain acceptable accuracy
8.3 Batch Processing
Process multiple detections together to reduce overhead.
8.4 Hardware Acceleration
Use:
- GPUs
- TPUs
- Edge AI chips
8.5 Region Caching
Reuse segmentation results across frames in video streams.
9. Challenges and Limitations
9.1 Computational Cost of SAM
Still expensive for:
- High-resolution images
- Multiple objects per frame
9.2 Latency in Dense Scenes
More objects → more SAM calls → slower pipeline.
9.3 Integration Complexity
Requires:
- Careful synchronization
- Pipeline tuning
- Memory optimization
9.4 Edge Deployment Limitations
Limited by:
- Hardware constraints
- Power consumption
- Memory bandwidth
10. Future of SAM + YOLO (Beyond 2026)
The future is moving toward:
10.1 Unified Vision Models
Single models that:
- Detect
- Segment
- Track simultaneously
10.2 Transformer-Based Pipelines
Replacing CNN-heavy architectures with:
- Vision transformers
- End-to-end reasoning models
10.3 Fully Edge-Native AI Vision
- Real-time segmentation on mobile devices
- Drone-based intelligence systems
10.4 Self-Optimizing Pipelines
AI systems that dynamically decide:
- When to run YOLO
- When to run SAM
- How much compute to allocate
11. Conclusion
The SAM + YOLO hybrid pipeline represents one of the most practical and impactful innovations in modern computer vision.
It solves a long-standing problem:
How to achieve real-time performance without sacrificing pixel-level accuracy.
By combining fast detection with precise segmentation, this architecture is becoming a foundational building block in:
- Autonomous systems
- Healthcare AI
- Robotics
- Smart cities
- Industrial automation
As we move deeper into 2026, this hybrid approach is not just a research idea—it is becoming a production standard in AI vision systems.
12. FAQ (Expanded SEO Section)
Q1: What is the SAM + YOLO hybrid pipeline?
It is a computer vision architecture that combines YOLO for fast object detection and SAM for high-precision segmentation.
Q2: Why combine SAM with YOLO?
To balance speed and accuracy—YOLO handles real-time detection, while SAM refines object boundaries.
Q3: Is SAM alone enough for segmentation?
Yes, but it is computationally expensive when applied to full images.
Q4: What industries benefit most?
Autonomous vehicles, robotics, healthcare, agriculture, and surveillance systems.
Q5: Can this pipeline run on edge devices?
Yes, but requires optimized models and hardware acceleration.
Q6: What is the biggest limitation?
SAM’s computational cost in dense or high-resolution scenes.
Q7: What is the future of this pipeline?
It will likely evolve into unified real-time vision transformers that combine detection and segmentation in a single model.