

Introduction Industry research shows that up to 80% of AI project time and overall cost go directly into data preparation and annotation. As frontier models, autonomous systems, and generative AI platforms scale through 2026, high-quality ground truth data remains the decisive bottleneck between an experimental prototype and a production-grade machine learning model. Despite this strategic importance, many engineering leads and AI teams still underestimate how significantly selecting the right data labeling partner affects model accuracy, ground truth precision, and overall AI budget efficiency. Choosing an enterprise-grade vendor for managed AI training data services ensures your pipelines receive clean, structured, and bias-free datasets while protecting your bottom line. Direct Research Source: Data issues in industrial AI systems: A meta-review and research strategy Why Choosing the Wrong Data Annotation Partner Leads to AI Failure? The biggest reason AI projects fail or stall in production is low-quality training data, and that almost always stems from choosing the wrong data annotation partner. Selecting an unequipped provider leads to poorly designed annotation workflows, which cause inconsistent labeling standards across teams. When companies rely on vendors that use unvetted crowdsourced workers without strict Human-in-the-Loop (HITL) quality control, entire batch runs get rejected, forcing teams into costly rework cycles. Furthermore, choosing a partner without a scalable workforce leaves engineering teams stranded during sudden burst demand phases. Because bad data leads directly to model failure, companies end up spending far more than planned to fix these mistakes. According to research highlighted by MIT Sloan, poor data quality and rework in data preparation pipelines regularly drain 15% to 25% of an organization’s operating budget. Direct Research Source: Scaling Annotation Without Losing Accuracy: A QA Playbook What Are Data Annotation Services & Data Annotation Types? Data annotation is the foundational process of labeling raw data, including images, video feeds, unstructured text, speech audio, and 3D point clouds, with meaningful contextual metadata so machine learning models can recognize patterns and make accurate predictions. Modern computer vision and NLP workflows rely on a broad range of data annotation services, including: Image & Video Annotation: Bounding boxes, polygon masks, keypoint tracking, and semantic segmentation for vision models. Text & NLP Datasets: Named Entity Recognition (NER), intent classification, sentiment analysis, and multilingual text tagging. 3D LiDAR & Point Cloud Labeling: Spatial object detection and multi-sensor fusion annotation for automotive autonomous driving and robotics. Audio & Speech Transcription: High-accuracy acoustic segmentation, speaker diarization, and phonetic transcription. To explore how tailored workforce management and custom annotation workflows can accelerate your model deployments, visit our dedicated Data Annotation Services Page. Top 10 Data Annotation Companies in 2026 SO Development OÜ : Your Trusted B2B Partner for EU & MENA AI Teams SO Development takes the top spot as a leading managed AI training data partner, built for enterprise AI engineering teams across Europe (EU) and the Middle East & North Africa (MENA). Backed by 5+ years of AI expertise, a dedicated workforce of 600+ skilled annotation professionals, and a proven history of 600+ completed projects across 25+ countries for 150+ customers, SO Development delivers scalable, end-to-end AI training data services. The company bridges high-throughput automation with rigorous Human-in-the-Loop (HITL) validation to serve complex modalities. Its core offerings cover: Precision Data Annotation: Multi-modal image segmentation, video tracking, and 3D LiDAR labeling for automotive and robotics. Specialized Data Collection & Transcription: Global multi-domain audio/speech collection, document digitizing, and localized Arabic and multilingual text datasets for NLP. Domain-Specific AI Solutions: Compliant medical AI data preparation (imaging, EHRs, genomic data), custom automotive datasets, Generative AI fine-tuning, Conversational AI validation, and AI Agent HITL supervision. SO Development ensures reliable delivery times and high accuracy. Enterprise clients rely on their strong data rules, fully aligned with GDPR standards for EU data privacy and HIPAA regulations for healthcare datasets, alongside competitive pricing and a strong commitment to ethical social impact sourcing. Official Website: SO Development Scale AI Scale AI remains the dominant vendor for Fortune 500 enterprises and frontier AI research labs requiring massive computer vision, LLM fine-tuning datasets, and Reinforcement Learning from Human Feedback (RLHF) pipelines. While highly automated and trusted by industry giants, its high enterprise pricing models and large minimum engagement commitments make it less accessible for startups and mid-market teams. Official Website: Scale AI Appen Appen is a long-standing provider with a massive global crowd of over 1 million contributors spanning 130+ countries. It excels in NLP datasets, speech annotation, and complex multilingual text corpora. Quality consistency across its vast distributed crowd requires careful client oversight during large-scale production runs. Official Website: Appe Precise BPO Solution Headquartered in India with over 540 full-time annotation specialists, Precise BPO Solution offers high-value image, video, and NLP text labeling. Aligned with ISO 27001, HIPAA, and GDPR standards, it provides budget-friendly rates and a free pilot batch for teams seeking full-service outsourcing without high enterprise costs. Official Website: Precise BPO Solution TELUS AI (formerly Lionbridge AI) Operating as part of TELUS International, this provider brings telecom-grade infrastructure and multilingual data support across 300+ languages. It is particularly strong in global content moderation datasets and large-scale trust & safety applications for multinational corporations. Official Website: TELUS International AI iMerit iMerit specializes in high-precision, highly regulated domains such as healthcare AI diagnostics, medical imaging annotation, and geospatial intelligence. By employing full-time domain experts rather than crowdsourced workers, iMerit ensures expert-level accuracy for complex medical and technical datasets. Official Website: iMerit Sama Sama combines structured computer vision annotation workflows with an ethical impact-sourcing model, employing workforce teams in underserved regions under fair-wage standards. Its controlled, in-house workforce model delivers high quality and consistent QA for mid-to-large enterprise computer vision projects. Official Website: Sama CloudFactory CloudFactory provides managed, dedicated workforce teams operating from delivery centers in Kenya and Nepal. Their managed team structure offers strong process documentation and consistent quality control, making them a reliable operational partner for ongoing human-in-the-loop tasks. Official Website: CloudFactory Labelbox Unlike managed service agencies, Labelbox is a Data Annotation Platform (SaaS) designed for internal AI engineering teams. It offers dataset management, ML

Introduction The autonomous vehicle (AV) and advanced robotics industry relies on a machine’s ability to understand its surroundings with perfect accuracy and in milliseconds. For these systems to make safe decisions on the road, they need millions of hours of highly accurate, labeled data. This is why AI data annotation services play a critical role in deciding the success or failure of computer vision models. If you manage an autonomous driving (ADAS) development team in the EU or MENA markets, facing issues like poor model accuracy or low quality annotations is one of the biggest challenges delaying your project launch. This comprehensive guide is designed to provide you with a LiDAR Annotation Quality Checklist. Based on the best technical practices and global legal standards, it will help you reduce annotation errors and ensure high AI data quality for your vehicles. What is Sensor Fusion Annotation? In complex driving environments, a vehicle cannot rely on just one sensor. Modern systems use what is known as Sensor Fusion, the smart combination of data streams coming from cameras, radar devices, and LiDAR systems. The importance of sensor fusion annotation comes from its ability to combine the features of each sensor to cover the weaknesses of the others: LiDAR: Gives the system 3D point clouds that provide highly accurate object dimensions and distances, but it struggles in bad weather like thick fog and does not provide color information. Digital Camera: Excellent for image video annotation, identifying shapes, reading traffic signs, and recognizing colors, but it lacks native depth and distance measurement and is affected by darkness. Radar: Measures direct speeds and penetrates through dust and rain, but its spatial resolution is low and it cannot classify objects accurately. When this data is fused together and labeled at the same time, the AI model learns how to make the right decisions even in difficult edge cases, such as detecting pedestrians stepping out suddenly from behind a parked car on a rainy night. Read Also: Real-Time LiDAR Annotation for Live Applications: Shaping the Future of Smart Systems How do you measure LiDAR annotation quality? To measure quality accurately and move your project from the prototype stage to production that complies with safety requirements, you must verify the data through strict spatial and temporal checks. Here are the main sections that your checklist should include: 1 Spatial & Temporal Alignment Checklist The biggest challenge in automotive data annotation is that sensors operate at different frequencies and times. The LiDAR spins at a certain speed, while the camera captures images at a different frame rate. Box Drift and Stability Check: Ensure there is no shifting or drift between the 2D bounding box on the image and the 3D cuboid on the point cloud. Any error, even by a few centimeters, will turn into noisy training signals that confuse the driving system. Timestamp Synchronization: Verify that the frame taken by the LiDAR matches the exact millisecond of the synchronized camera frame. This is especially important when tracking high-speed objects on highways to prevent ghost objects or incorrect location estimates. 2. Cross Modal Consistency Checklist When a road object appears in front of the car, all sensors must see it as a single entity with the exact same attributes. Class Uniformity: A common error that confuses smart models is labeling a vehicle as a (truck) in the camera image but as a (car) in the LiDAR point cloud. The class must match perfectly. ID Stability & Object Tracking: When tracking a moving object across hundreds of sequential frames, the object must keep the same identification number (e.g., ID: 005). If the ID jumps or changes between frames, it destroys the car’s ability to predict the future movement of surrounding objects. Heading & Orientation: The front-facing arrow of the 3D cuboid must point in the correct direction confirmed by radar and camera data to ensure safe path planning and turning calculations. 3. Edge Cases & Environmental Conditions Checklist Training only on clean streets and in sunny weather will not make your vehicle safe. Most autonomous vehicles (AV) failures happen due to rare and unexpected scenarios known as edge cases. To solve this, teams use an active learning strategy, where the model filters massive amounts of unlabeled data, flags frames with high uncertainty, and sends them immediately to human reviewers. Occlusion Flags: Mark partially hidden objects clearly (such as a pedestrian whose half body is hidden behind a delivery truck, or an animal crossing behind concrete barriers). Contextual Classification: Annotators must have enough domain knowledge to distinguish between similar objects based on context; for example, separating a cyclist riding a bike from a pedestrian walking a bike, because their movement behaviors are completely different. Static Infrastructure Labeling: Label temporary construction cones, signs, and double-parked cars accurately to separate them from the permanent environment. 4. Safety and Data Governance: When working for companies in the EU or the MENA region, quality is not just technical, it also includes strict compliance with data protection and AI laws. EU AI Act Article 10 Compliance: Ensure datasets represent all real-world driving conditions (night driving, heavy rain, fog, glare) to prevent model bias or failure in non-standard conditions. Maintain digital audit trails showing who labeled each frame and how disagreements were resolved. GDPR Compliant Data Annotation (Privacy Control): Before any data reaches the annotation team, ensure automated software blurs faces and license plates in the camera streams while keeping the exact spatial coordinates in the LiDAR point cloud. Recommended: How to Prepare Your Autonomous Vehicle Training Data to Comply with Article 10 of the EU AI Act? 4. Human-in-the-Loop (HITL) Validation: While pre-labeling tools speed up the workflow, relying entirely on automation is a major risk when human safety is on the line. Successful data pipelines use human in the loop AI services to let experts review complex scenes and fix subtle errors. Inter-Annotator Agreement: Measure how much different human annotators agree on the same datasets. If agreement is low for a specific category, update the
AI systems revolutionizing the healthcare sector today rely entirely on the quality of training data, ranging from critical disease prediction algorithms to surgical robotics systems. In the medical field, data cannot be treated like any other commercial sector. Simple errors in data classification do not just mean financial loss; they can lead to real diagnostic catastrophes that impact patient safety, such as a model missing thousands of cancerous tumors in their early stages due to a systematic error in Medical data annotation. This flaw directly causes a waste of development teams’ time and resources, and erodes doctors’ trust in Medical AI solutions. To avoid these failures and ensure your model successfully transitions from the lab phase to the clinical validation phase, we have prepared this guide for choosing a medical data annotation partner. This simplified and concise guide aims to help healthcare AI teams evaluate medical data solutions partners and annotation service providers, while identifying the six critical criteria to ensure choosing a strategic partner that understands the nature and accuracy of medical work. You can download the full version of the guide as a free PDF via the form below. Visit Our Data Annotation Service Visit Now
Introduction: Are Transformers Approaching Their Limits? Since the release of “Attention Is All You Need” by Google researchers in 2017, the Transformer architecture has become the foundation of modern artificial intelligence. Nearly every major large language model (LLM) today — including GPT-based models, Gemini, Claude, and many open-source systems — relies heavily on Transformer-based designs. Transformers changed AI by introducing self-attention, allowing models to analyze relationships between words across an entire sequence instead of processing information step-by-step like older recurrent neural networks (RNNs). This innovation enabled massive scaling and led to today’s generative AI revolution. However, a growing number of researchers believe that simply making Transformers larger may not be the final path toward more capable AI systems. A recent Google research direction has reignited this debate by exploring the limitations of Transformer architectures and investigating alternatives that could define the next generation of AI models. The Transformer Revolution Before Transformers, language models were dominated by architectures such as: Recurrent Neural Networks (RNNs) Long Short-Term Memory Networks (LSTMs) Convolutional Neural Networks (CNNs) These approaches processed sequences sequentially, making training slower and limiting their ability to capture long-range dependencies. The Transformer solved many of these problems through self-attention. Instead of reading: “The cat sat on the mat” one word at a time, a Transformer can evaluate relationships between all words simultaneously. This parallel processing capability allowed researchers to train models with billions — and eventually trillions — of parameters. The result: Better language understanding More fluent text generation Improved translation Stronger reasoning capabilities Multimodal AI systems The Transformer became the default architecture for scaling AI. The Problem: Scaling Transformers Is Becoming Expensive Although Transformers are powerful, they have a fundamental challenge: attention complexity. The self-attention mechanism compares tokens with each other. As context length increases, the computational and memory requirements grow significantly. For example: A 1,000-token input requires attention calculations across many token pairs. A 100,000-token input creates a much larger computational burden. This creates challenges for: Long-document analysis AI agents with persistent memory Real-time applications Edge AI deployment Google researchers and other AI scientists have been investigating ways to overcome these limitations through more efficient attention mechanisms and alternative architectures. Google’s Research: Questioning Transformer Limitations One notable paper from Google DeepMind, “On Limitations of the Transformer Architecture,” examines theoretical weaknesses of Transformer-based models. The researchers argue that some reasoning and compositional tasks may be difficult for Transformers at scale. Their analysis suggests that certain limitations are not simply caused by insufficient training data or model size, but may be connected to fundamental properties of the architecture itself. The paper focuses on questions such as: Can Transformers reliably perform complex reasoning over very large structures? Are hallucinations partly caused by architectural limitations? Are there classes of problems where scaling Transformers will not be enough? The conclusion is not that Transformers are obsolete, but rather that new architectures may be required for the next stage of AI development. What Could Replace Transformers? Researchers are exploring several possible directions. 1. Modern Recurrent Neural Networks Interestingly, one possible future may involve improved versions of older ideas. Traditional RNNs had a major weakness: limited memory. However, modern approaches are attempting to create systems with: More efficient memory storage Longer context handling Lower computational cost The goal is to combine the efficiency of recurrence with the capabilities expected from modern LLMs. 2. State Space Models (SSMs) State Space Models have gained attention as alternatives to Transformers. Unlike attention-based models, SSMs can process sequences more efficiently because they do not require every token to directly interact with every other token. Benefits may include: Linear scaling with sequence length Faster inference Lower memory usage Models such as Mamba have demonstrated that non-Transformer architectures can compete in certain language modeling tasks. 3. Hybrid Architectures The future may not be a complete replacement of Transformers. Instead, AI systems may combine: Transformers for complex reasoning Memory systems for long-term information Recurrent components for efficiency External tools for knowledge retrieval Google has already explored hybrid approaches, including architectures designed to improve efficiency while maintaining Transformer-level performance. Why This Matters for the AI Industry If the Transformer era evolves, the impact could be enormous. Lower AI Costs Training and running today’s largest models requires: Thousands of GPUs Massive energy consumption Expensive infrastructure More efficient architectures could make advanced AI accessible to smaller companies. Better AI Agents Future AI agents need: Persistent memory Long-term planning Continuous learning Current Transformer systems often rely on external memory solutions because the architecture itself does not naturally maintain lifelong memory. New architectures could enable AI systems that remember, learn, and adapt more naturally. AI on Edge Devices Efficient architectures could bring advanced AI to: Smartphones Robots Vehicles Medical devices Industrial systems Instead of requiring cloud-scale computing, smaller models could operate locally. Does This Mean the Transformer Era Is Ending? Not yet. The Transformer is still the dominant architecture because it works extremely well. Modern improvements continue to make Transformers better through: Optimized attention mechanisms Mixture-of-Experts models Retrieval augmentation Better training methods Hardware acceleration Google itself has continued developing Transformer-based systems while researching alternatives. A more realistic prediction is: The future of AI may move from “Transformer-only” models toward a combination of multiple architectures. The next generation of AI may not be defined by replacing Transformers completely, but by building systems that overcome their weaknesses. The Future: Beyond Bigger Models For years, AI progress followed a simple formula: More data + More parameters + More computing power = Better AI But researchers are increasingly asking whether scaling alone can continue forever. The next breakthrough may come from: Better architectures More efficient memory systems Improved reasoning mechanisms New approaches inspired by neuroscience Google’s research highlights an important shift: the future of AI may not belong exclusively to bigger Transformers, but to smarter architectures designed around how intelligence actually works. The Transformer changed AI forever. The next revolution may come from what replaces — or evolves beyond — it. References Vaswani, A. et al. Attention Is All You Need
Introduction OpenAI has launched its new GPT 5.6 model family, available in three versions: Sol, Terra, and Luna. In this post, we will explore what makes this new generation unique, how to use it, and what it costs. Compared to older versions like GPT 5.5, as well as Claude and Gemini. An Overview of GPT 5.6 GPT 5.6 is a new family of three models. Currently launching in a closed, limited preview coordinated closely with the U.S. government, While it isn’t open to the general public just yet, the details OpenAI shared point to some massive, exciting leaps in performance, especially when it comes to coding, quantitative biology, and cybersecurity. With this release, OpenAI is using a new naming system. The number (5.6) shows the tech generation, while the names (Sol, Terra, and Luna) show how powerful each model is. This new setup allows OpenAI to update each model on its own time without confusing users. Three Tiers: Sol, Terra, and Luna OpenAI designed the GPT 5.6 family to handle different business needs efficiently: 1. GPT 5.6 Sol This is the powerful model of the lineup. It’s the top model that OpenAI uses to beat all the major industry benchmarks. GPT 5.6 Sol exclusively introduces two unique features: max reasoning effort and ultra mode. It is incredibly strong at solving complex, multi-step problems in science and cybersecurity, making it the go-to choice for demanding projects where maximum intelligence matters way more than the price tag. 2. GPT 5.6 Terra GPT 5.6 Terra was built to be a reliable, everyday worker. Its biggest selling point is high performance at a very reasonable price. It easily competes with the previous generation’s top model (GPT 5.5) but is about twice as cheap to run. For enterprise workloads that require high accuracy without a massive cloud budget, GPT 5.6 Terra represents the new sweet spot in the AI market, getting last year’s top quality at a mid-range price. Many businesses would prefer to adopt GPT 5.6 Terra to handle complex data transformation pipelines. 3. GPT 5.6 Luna: GPT 5.6 Luna is the fastest and most budget friendly option in the lineup. It’s tailor made for high-volume data tasks or systems that need near-instant response times (latency-sensitive applications). OpenAI made it clear that just because it’s the cheapest doesn’t mean it’s weak, it still delivers excellent results on routine, day-to-day tasks. How can businesses choose the right AI model without risking the accuracy of their results? What Sets GPT 5.6 Apart? 1. Advanced Reasoning & Agents This update brings some incredibly smart ways to boost reasoning and agentic capabilities. To push past the limits of traditional AI, OpenAI added two new controls to let users get the absolute most out of the model: Max Reasoning Effort: A setting that gives Sol more time to think deeply and analyze complex issues thoroughly before giving you an answer. Ultra Mode: This goes beyond what a single AI assistant can do. It launches and coordinates a group of smaller subagents to divide and conquer massive tasks, which is exactly how it managed to top the latest coding leaderboards. When it comes to coding, GPT 5.6 Sol set a new record on Terminal-Bench 2.1, a benchmark designed to test how well AI handles command-line workflows that require long-term planning, iteration, and switching between different tools. How will subagent architecture change the way companies build software and applications? 2. Safety and Training Data The GPT 5.6 family combines smarter training with multi-layered safety features to ensure a secure business experience. The models were trained using reinforcement learning on massive datasets from public sources and private partnerships, all heavily filtered to strip out personal information and block harmful content. Because the model can think and reason internally before responding, it naturally resists jailbreak attempts. This is backed up by real-time filters that check outputs as they are generated, alongside account-level monitoring to separate malicious behavior from legitimate defensive security research. If you want to dive into the legal terms and content retention rules, you can review the OpenAI Usage Policies. GPT 5.6 Benchmark Results Here is a quick look at how the new models compare to the competition on the popular Terminal-Bench 2.1 test, sorted from highest to lowest: Model Terminal-Bench 2.1 Score GPT-5.6 Sol Ultra 91.9% GPT-5.6 Sol 88.8% GPT-5.5 88.0% GPT-5.6 Luna 84.3% Claude Mythos 5 84.3% Claude Fable 5 83.4% GPT-5.6 Terra 82.5% Claude Opus 4.8 78.9% Gemini 3.1 Pro Preview 70.7% Why the Cautious Rollout? OpenAI shared its plans and capabilities with the U.S. government before launch, and at their request, is keeping things limited to a small group of trusted partners for now. This level of caution is due to tightening regulatory oversight. This is actually the second time in a month a major AI launch faced government intervention, just two weeks ago, U.S. export controls forced Anthropic to pull its Claude Fable 5 and Mythos 5 models offline globally. By working with regulators early, OpenAI chose to hand over the keys upfront rather than risk getting their models yanked after shipping. Read the full story: U.S. Lifts Restriction On Anthropic’s Mythos 5 And Fable 5 AI Model How much will government export policies slow down the actual pace of innovation for AI companies? GPT 5.6 Access and Pricing Right now, these models are accessible to selected partners via the API and Codex platform, with plans to bring them to ChatGPT soon. This limited preview is currently available only for approved companies. If your company is approved, you can obtain GPT 5.6 Access through your developer dashboard or contact support. OpenAI is working on making these models available to all users in weeks, but a universal rollout for GPT 5.6 Access has not been scheduled for general public release yet. Secure your corporate GPT 5.6 Access early by aligning your data infrastructure with government safety standards. Pricing is calculated per 1 million tokens across the three tiers: Check your eligibility and access to the new
Introduction Healthcare is rapidly shifting from traditional digital systems toward intelligent, data-driven ecosystems powered by Artificial Intelligence. At the core of this transformation lies medical AI data, which fuels everything from disease detection and patient monitoring to predictive analytics and autonomous decision-making. In 2026, we are entering a new phase known as autonomous healthcare systems, where AI is no longer limited to assisting clinicians but is increasingly capable of performing complex medical tasks with minimal human intervention. These systems depend on vast, high-quality, and continuously evolving datasets that combine medical imaging, clinical records, lab results, and real-time patient data. As hospitals and healthcare providers adopt AI at scale, the quality, structure, and governance of medical data have become more important than ever. Without reliable data, even the most advanced AI models fail to deliver safe and accurate outcomes. This makes medical AI data not just a technical requirement, but a foundational pillar of modern healthcare innovation. What Is Medical AI Data? Medical AI data refers to structured and unstructured healthcare information used to train machine learning and deep learning models. It includes: Medical imaging (CT, MRI, X-ray, ultrasound) Clinical text (doctor notes, discharge summaries) Electronic health records (EHR) Lab results and diagnostic reports Pathology slides Physiological signals (ECG, EEG, vitals) Genomic and biomarker data This data is used to build systems that can assist or fully automate tasks such as diagnosis, triage, treatment planning, and monitoring. What Are Autonomous Healthcare Systems? Autonomous healthcare systems are AI-powered environments capable of performing healthcare-related tasks with minimal human intervention. These systems can: Detect diseases from imaging data Recommend treatments based on patient history Monitor patient conditions in real-time Predict health risks before symptoms appear Support surgical procedures using robotic systems Automate administrative and clinical workflows In advanced implementations, AI systems work alongside healthcare professionals or operate independently under strict regulatory frameworks. The Role of Data in Autonomous Healthcare The success of autonomous healthcare systems depends entirely on data quality. Poor data leads to incorrect predictions, while high-quality data leads to life-saving accuracy. Key roles of medical AI data include: 1. Training Intelligent Diagnostic Models AI systems learn to detect diseases such as cancer, cardiovascular conditions, and neurological disorders through annotated datasets. 2. Enabling Predictive Healthcare Historical patient data allows AI models to predict disease risks before symptoms appear. 3. Supporting Clinical Decision-Making AI systems analyze patient records to recommend personalized treatments. 4. Powering Real-Time Monitoring Wearable devices generate continuous data streams for AI-based monitoring systems. Evolution of Medical AI Data Phase 1: Manual Data Collection Paper records Limited digitization Slow and error-prone systems Phase 2: Digital Healthcare Systems Electronic Health Records (EHR) Structured hospital databases Early AI experiments Phase 3: AI-Assisted Data Annotation Computer vision tools NLP-assisted labeling Human-in-the-loop systems Phase 4: Agentic AI Healthcare Systems (2026+) AI agents manage data collection Automated annotation pipelines Continuous learning systems Real-time dataset optimization How AI Agents Are Transforming Medical Data AI agents are becoming a core part of medical data pipelines. They can: Automatically label medical images Detect annotation errors in datasets Standardize clinical terminology Validate dataset consistency Identify missing or biased data Improve dataset quality over time Instead of static datasets, healthcare AI now relies on living datasets that evolve continuously. Multimodal Medical AI Data: The Future Standard Autonomous healthcare systems require multimodal datasets, combining: Imaging data (radiology, pathology) Text data (clinical notes) Audio data (doctor-patient conversations) Sensor data (wearables, ICU monitors) Genomic data (DNA, biomarkers) Multimodal AI allows systems to understand patients holistically rather than relying on a single data source. Key Challenges in Medical AI Data Despite rapid advancements, several challenges remain: 1. Data Privacy and Security Healthcare data is highly sensitive and must comply with strict regulations such as HIPAA and GDPR. 2. Data Quality and Consistency Inconsistent labeling or poor-quality annotations can lead to incorrect diagnoses. 3. Bias in Medical Datasets If datasets are not diverse, AI models may perform poorly across populations. 4. Limited Access to Data Hospitals often restrict data sharing due to privacy concerns. 5. Complex Annotation Requirements Medical data requires expert-level annotation, especially in radiology and pathology. The Rise of Synthetic Medical Data To address data scarcity, synthetic medical data is becoming increasingly important. Synthetic data can: Simulate rare diseases Enhance dataset diversity Protect patient privacy Accelerate model training However, synthetic data must be carefully validated to ensure clinical relevance. Future Trends in Medical AI Data 1. Fully Autonomous Data Pipelines AI systems will collect, annotate, validate, and optimize datasets without human intervention. 2. Real-Time Data Learning Healthcare AI will continuously learn from live patient data streams. 3. AI-Generated Clinical Insights Systems will not only analyze data but also propose medical hypotheses. 4. Personalized Medicine at Scale AI will tailor treatments based on individual genetic and medical profiles. 5. Global Medical Data Networks Secure, federated systems will allow hospitals worldwide to collaborate without sharing raw patient data. Human + AI Collaboration Will Remain Essential Even in highly autonomous systems, human experts remain critical. Doctors, radiologists, and medical annotators will: Validate AI predictions Handle complex cases Oversee ethical decisions Ensure clinical safety The future is not full replacement—it is intelligent collaboration. How Companies Like SO Development Fit In Organizations like SO Development play a key role in building high-quality medical AI datasets through: Expert medical data annotation AI-assisted labeling workflows Human-in-the-loop validation Multimodal dataset creation Scalable data operations for enterprise AI systems These capabilities help bridge the gap between raw medical data and production-ready AI systems. Conclusion The future of healthcare is being shaped by the quality and intelligence of its data. As autonomous healthcare systems continue to evolve, medical AI data will remain the critical foundation enabling accurate diagnosis, predictive care, and intelligent clinical decision-making. We are moving toward a world where AI systems can analyze multimodal medical information in real time, support doctors with highly precise insights, and even automate parts of the healthcare workflow. However, this progress depends heavily on continuous improvements in data quality, annotation accuracy, privacy protection, and ethical governance. While
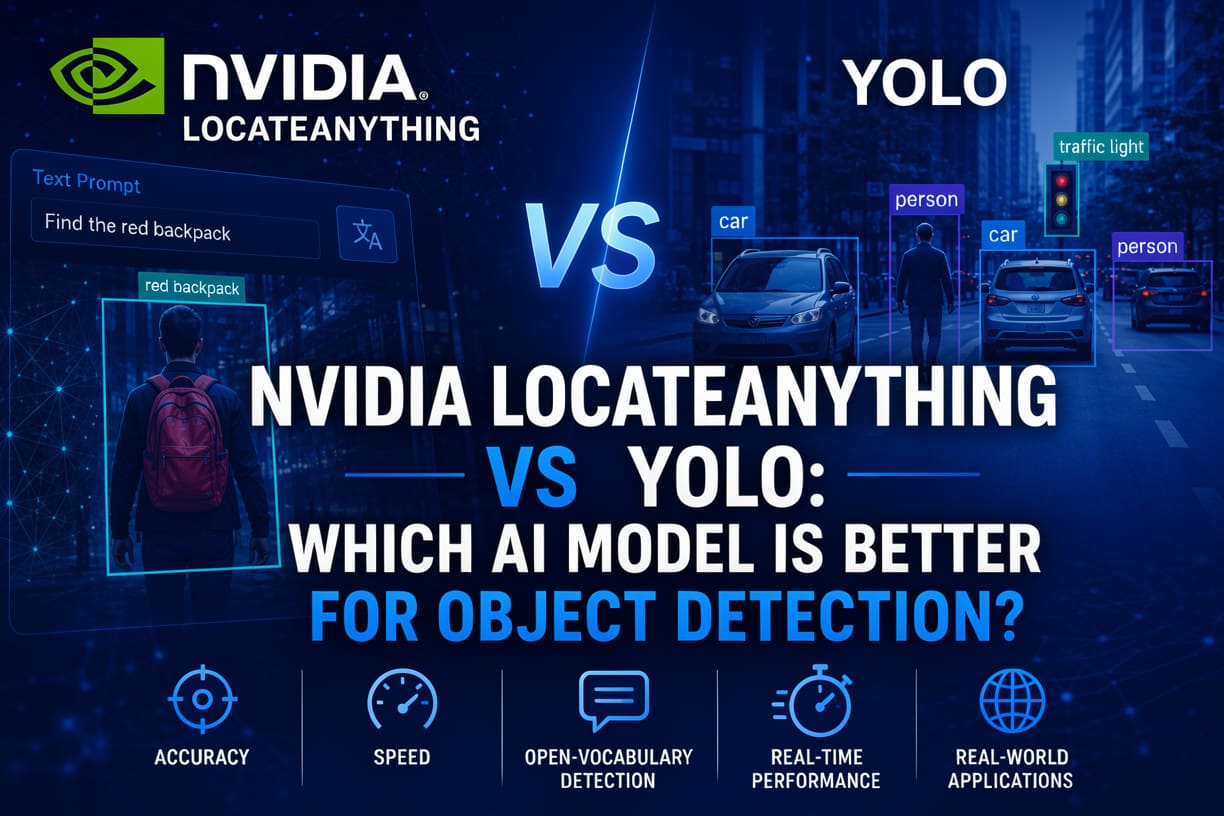
Introduction The field of computer vision is evolving faster than ever. Traditional object detection models are no longer enough for many modern AI applications. Organizations now require systems capable of identifying previously unseen objects, understanding visual contexts, and performing accurate localization without extensive retraining. This shift has led to the emergence of innovative models like NVIDIA LocateAnything, which challenges established object detection frameworks such as YOLO (You Only Look Once). As enterprises build smarter AI systems for robotics, autonomous vehicles, healthcare, retail analytics, and industrial automation, choosing the right vision model becomes increasingly important. So, how does NVIDIA LocateAnything compare with YOLO? Which model is better for your use case in 2026? Let’s dive deep into the comparison. Understanding NVIDIA LocateAnything NVIDIA LocateAnything is a foundation vision model designed to locate objects within images using natural language prompts. Unlike traditional object detectors that require predefined categories during training, LocateAnything can identify and localize objects that it has never explicitly seen before. For example, instead of training a detector specifically for: Cars Pedestrians Traffic signs A user can simply provide a text prompt such as: “Locate the red toolbox.” or “Find all damaged products.” The model understands the request and identifies matching objects within the image. This capability is known as: Open-vocabulary object localization Language-guided detection Prompt-based visual understanding LocateAnything represents the next generation of vision foundation models that combine computer vision and large language model concepts. Understanding YOLO YOLO (You Only Look Once) remains one of the most popular object detection frameworks in the world. Since its introduction, YOLO has become the industry standard for real-time detection due to its: Exceptional speed Low latency High accuracy Easy deployment Modern versions such as YOLOv11, YOLOv12, and custom enterprise variants continue to dominate applications requiring rapid object detection. YOLO processes an image in a single forward pass and outputs: Bounding boxes Class labels Confidence scores The result is highly efficient object detection suitable for edge devices and production environments. Core Architectural Differences The biggest difference lies in how each model understands objects. NVIDIA LocateAnything LocateAnything relies on foundation-model principles. It learns broad visual concepts and aligns them with language understanding. Advantages include: Open-vocabulary detection Natural language interaction Zero-shot localization Generalized visual reasoning The model is not restricted to fixed categories. YOLO YOLO follows a supervised object detection approach. It learns specific object classes during training. Advantages include: High-speed inference Lightweight deployment Efficient edge processing Strong performance on known categories However, YOLO cannot identify entirely new object classes without retraining. Detection Flexibility Detection flexibility is where LocateAnything shines. Consider a warehouse environment. A manager wants to locate: “Damaged cardboard boxes near loading areas.” YOLO cannot directly perform this task unless: Damaged boxes are annotated A custom dataset is created The model is retrained LocateAnything can often understand the request immediately through text prompts. This dramatically reduces dataset preparation costs. Speed Comparison When speed matters, YOLO remains difficult to beat. YOLO Speed Advantages YOLO is optimized for: Real-time video analytics Autonomous navigation Security surveillance Industrial robotics Modern YOLO models can process dozens or even hundreds of frames per second depending on hardware. LocateAnything Speed Considerations LocateAnything prioritizes understanding and flexibility rather than pure speed. Because it combines visual and semantic reasoning, inference is typically slower. For applications requiring millisecond-level decisions, YOLO often remains the preferred choice. Accuracy Comparison Accuracy depends heavily on the application. YOLO Accuracy For predefined object classes: Vehicles People Animals Manufacturing defects YOLO delivers excellent precision and recall. When trained on high-quality datasets, YOLO can achieve state-of-the-art results. LocateAnything Accuracy LocateAnything excels when dealing with: Unseen objects Complex descriptions Semantic queries Open-world environments The model can locate objects that traditional detectors were never trained to recognize. This creates a significant advantage in dynamic environments. Training Requirements One of the biggest cost factors in AI deployment is data annotation. YOLO Requires Large annotated datasets Bounding box labels Class definitions Retraining for new categories Building custom datasets can be expensive and time-consuming. LocateAnything Requires Minimal task-specific training Natural language prompts Few-shot adaptation Zero-shot localization Organizations can deploy new use cases much faster. Segmentation and Localization Capabilities Modern AI systems increasingly require segmentation rather than simple bounding boxes. LocateAnything integrates naturally with segmentation pipelines. For example: Locate object Generate mask Perform detailed analysis This makes it highly compatible with foundation models such as: Segment Anything Model (SAM) Vision-language models Multimodal AI systems YOLO also supports segmentation variants but generally relies on predefined training classes. Hardware Requirements YOLO Works efficiently on: NVIDIA GPUs Edge devices Jetson platforms Embedded systems Industrial cameras Many versions can run in real time on modest hardware. LocateAnything Generally requires: More GPU memory Stronger compute resources Foundation-model infrastructure Organizations should account for higher infrastructure costs. Real-World Applications Best Use Cases for YOLO Autonomous Vehicles Fast detection of: Cars Pedestrians Road signs Smart Surveillance Real-time monitoring and alerts. Manufacturing Defect detection on production lines. Retail Analytics Customer tracking and inventory monitoring. Best Use Cases for LocateAnything Enterprise Search Locate products using natural language. Robotics Understand human instructions. Industrial Inspection Find unusual defects without retraining. Digital Asset Management Search large image collections semantically. Medical Imaging Locate visual patterns described through text. NVIDIA LocateAnything vs YOLO: Feature Comparison Feature NVIDIA LocateAnything YOLO Open-Vocabulary Detection Yes No Real-Time Performance Moderate Excellent Zero-Shot Learning Yes Limited Custom Training Required Minimal Extensive Edge Deployment Limited Excellent Language Understanding Yes No New Object Discovery Excellent Poor Production Maturity Emerging Very High Segmentation Integration Strong Good Resource Efficiency Moderate Excellent Which Model Should You Choose? The answer depends entirely on your project requirements. Choose YOLO if you need: Real-time detection Edge deployment Low latency Known object categories Cost-efficient inference Choose LocateAnything if you need: Open-world detection Natural language search Zero-shot localization Flexible AI workflows Foundation-model capabilities Many organizations will ultimately combine both approaches. A common architecture in 2026 is: YOLO performs rapid object detection. LocateAnything handles semantic searches. SAM generates precise segmentation masks. LLMs interpret results and automate decisions. This hybrid approach delivers both speed and intelligence.
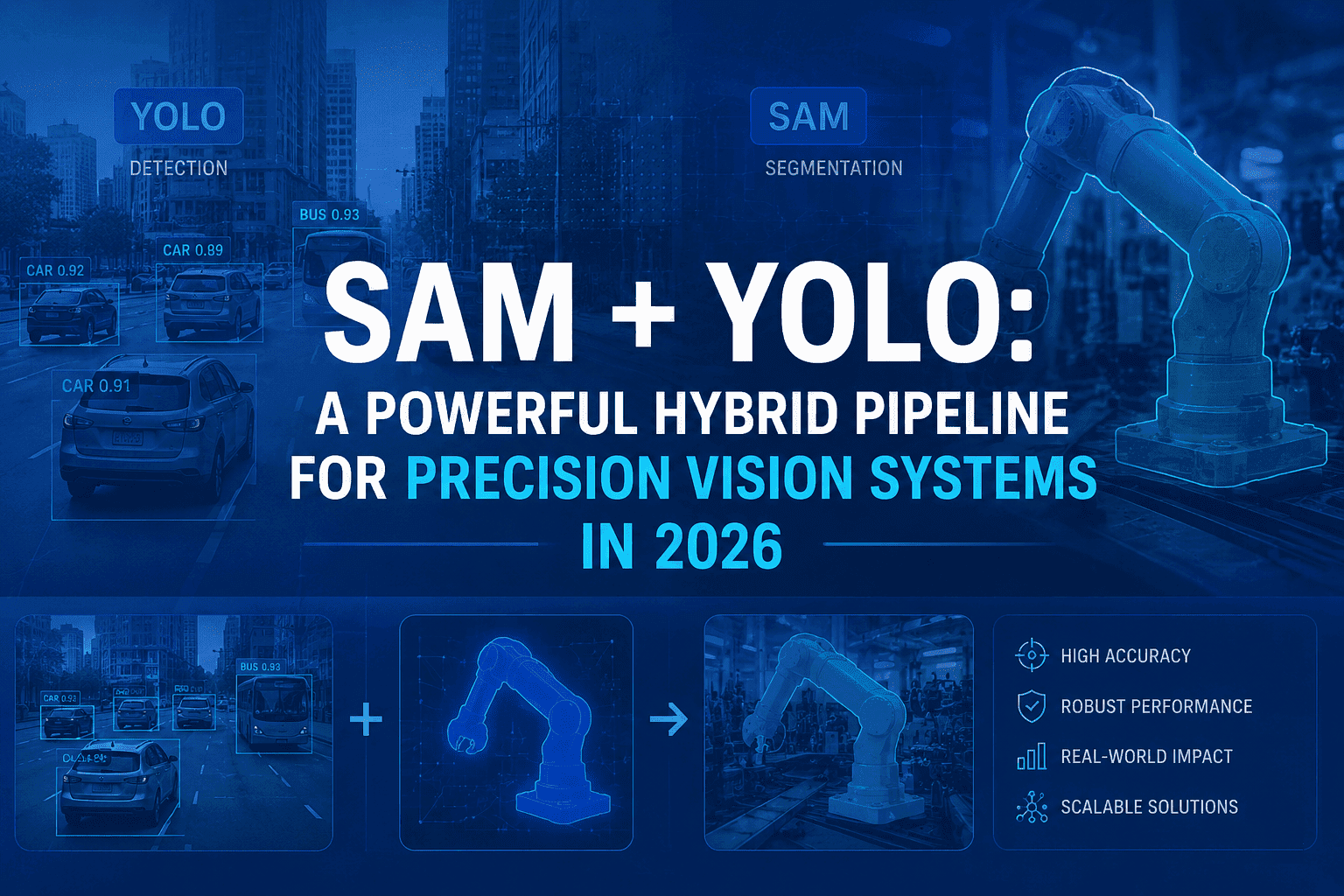
Introduction Computer vision is entering a new era of integration and efficiency. For years, vision systems have largely depended on two distinct approaches: object detection models that quickly locate and classify objects within an image, and segmentation models that provide detailed, pixel-level understanding of those objects. Each approach has proven highly effective in its own right, yet both come with inherent limitations when used independently in real-world applications that demand both speed and precision. To bridge this gap, a new hybrid architecture has emerged: the combination of YOLO (You Only Look Once) and Segment Anything Model (SAM). In this unified pipeline, YOLO delivers rapid and efficient object detection, while SAM provides highly accurate, pixel-level segmentation of the detected objects. Together, they form a complementary system that balances performance and precision. This integration enables capabilities that were previously difficult to achieve simultaneously: real-time inference, fine-grained segmentation accuracy, optimized computational efficiency, and scalability across diverse deployment environments. As of 2026, the YOLO + SAM hybrid is increasingly shifting from experimental research to practical adoption, positioning itself as a foundational architecture in modern computer vision systems across industries. 2. The Core Problem in Traditional Computer Vision 2.1 The Speed vs Accuracy Dilemma Computer vision systems traditionally suffer from a fundamental trade-off: Model Type Strength Weakness YOLO Extremely fast inference Weak segmentation precision SAM High-quality segmentation High computational cost This creates a major problem: Fast models are not precise enough Precise models are not fast enough In real-world systems such as autonomous driving or robotics, this trade-off is unacceptable. 2.2 Why Full-Image Segmentation is Inefficient Running segmentation models like SAM on full images leads to: High GPU usage Increased latency Unnecessary computation on empty regions Poor scalability for real-time video streams For example, in a 4K frame: Only a small fraction of pixels contain meaningful objects Yet full-image segmentation processes everything equally This inefficiency becomes critical in production systems. 2.3 The Need for Selective Vision Modern AI systems require a shift in philosophy: Instead of analyzing everything, analyze only what matters. This is the foundation of the SAM + YOLO hybrid pipeline. 3. What is the SAM + YOLO Hybrid Pipeline? The SAM + YOLO pipeline is a two-stage computer vision architecture designed to combine real-time detection with high-precision segmentation. 3.1 Core Idea The pipeline works as follows: YOLO detects objects in real time SAM refines only selected regions Outputs are merged into a structured scene representation 3.2 Why This Works YOLO provides: Fast bounding box detection Class labels Real-time inference SAM provides: Pixel-level segmentation Accurate object boundaries Robust generalization Together, they form a balanced vision system. 3.3 Key Insight Instead of asking: “How do we segment everything perfectly?” We ask: “How do we segment only what is necessary?” This shift dramatically reduces computational cost. 4. Architecture of the SAM + YOLO Pipeline 4.1 Step 1: Input Acquisition The system receives input from: Cameras (CCTV, drones, vehicles) Medical scanners Industrial sensors Satellite imagery systems Each frame is treated as a processing unit. 4.2 Step 2: YOLO Detection Stage YOLO processes the image and outputs: Bounding boxes Object classes Confidence scores Example: Person → 0.92 confidence Car → 0.89 confidence Bicycle → 0.78 confidence This stage is extremely fast, often running in milliseconds. 4.3 Step 3: Region Filtering Not all detections are processed further. Filtering is based on: Confidence threshold Object priority Application-specific rules This reduces unnecessary SAM calls. 4.4 Step 4: SAM Segmentation Stage SAM is applied only to selected bounding boxes. It generates: Pixel-level masks Object boundaries Refined segmentation maps This is the most computationally expensive step—but now heavily optimized. 4.5 Step 5: Output Fusion Final output includes: YOLO bounding boxes SAM masks Object metadata Spatial relationships This creates a full scene understanding output. 5. Why the SAM + YOLO Pipeline is a Breakthrough 5.1 Massive Efficiency Improvement Instead of segmenting full images, we only segment: Detected objects Relevant regions This reduces computation significantly. 5.2 Real-Time Capability YOLO ensures: Fast detection (real-time) SAM ensures: High precision only where required This makes real-time segmentation practical. 5.3 Scalability Across Systems The pipeline works across: Cloud systems Edge devices Hybrid architectures 5.4 Better Performance in Complex Scenes Especially effective in: Crowded environments Occlusions Overlapping objects Dynamic motion scenarios 6. Advanced Variants of the Pipeline 6.1 YOLO + SAM with Tracking Used in video systems: Maintains object identity across frames Reduces repeated computation Improves temporal consistency 6.2 Prompt-Guided SAM YOLO outputs are converted into SAM prompts: Bounding boxes Points Region proposals This improves segmentation accuracy and speed. 6.3 Multi-Scale Detection Fusion YOLO runs at multiple scales: Small objects Medium objects Large objects Results are merged before segmentation. 6.4 Edge-Optimized Architectures Designed for: Drones Mobile robots IoT devices Uses: Lightweight YOLO variants Distilled SAM models 7. Real-World Applications 7.1 Autonomous Vehicles Real-time object detection Lane and obstacle segmentation Pedestrian boundary accuracy 7.2 Robotics Object grasping Industrial automation Navigation in dynamic environments 7.3 Medical Imaging Tumor detection Organ segmentation Diagnostic assistance 7.4 Smart Agriculture Crop monitoring Weed detection Yield estimation 7.5 Surveillance Systems Crowd monitoring Suspicious object detection Behavioral analysis 8. Optimization Strategies 8.1 Reducing SAM Calls Only process: High-confidence detections Priority classes 8.2 Model Quantization Reduce model size Improve inference speed Maintain acceptable accuracy 8.3 Batch Processing Process multiple detections together to reduce overhead. 8.4 Hardware Acceleration Use: GPUs TPUs Edge AI chips 8.5 Region Caching Reuse segmentation results across frames in video streams. 9. Challenges and Limitations 9.1 Computational Cost of SAM Still expensive for: High-resolution images Multiple objects per frame 9.2 Latency in Dense Scenes More objects → more SAM calls → slower pipeline. 9.3 Integration Complexity Requires: Careful synchronization Pipeline tuning Memory optimization 9.4 Edge Deployment Limitations Limited by: Hardware constraints Power consumption Memory bandwidth 10. Future of SAM + YOLO (Beyond 2026) The future is moving toward: 10.1 Unified Vision Models Single models that: Detect Segment Track simultaneously 10.2 Transformer-Based Pipelines Replacing CNN-heavy architectures with: Vision transformers End-to-end reasoning models 10.3 Fully Edge-Native AI Vision Real-time segmentation on mobile devices Drone-based intelligence systems
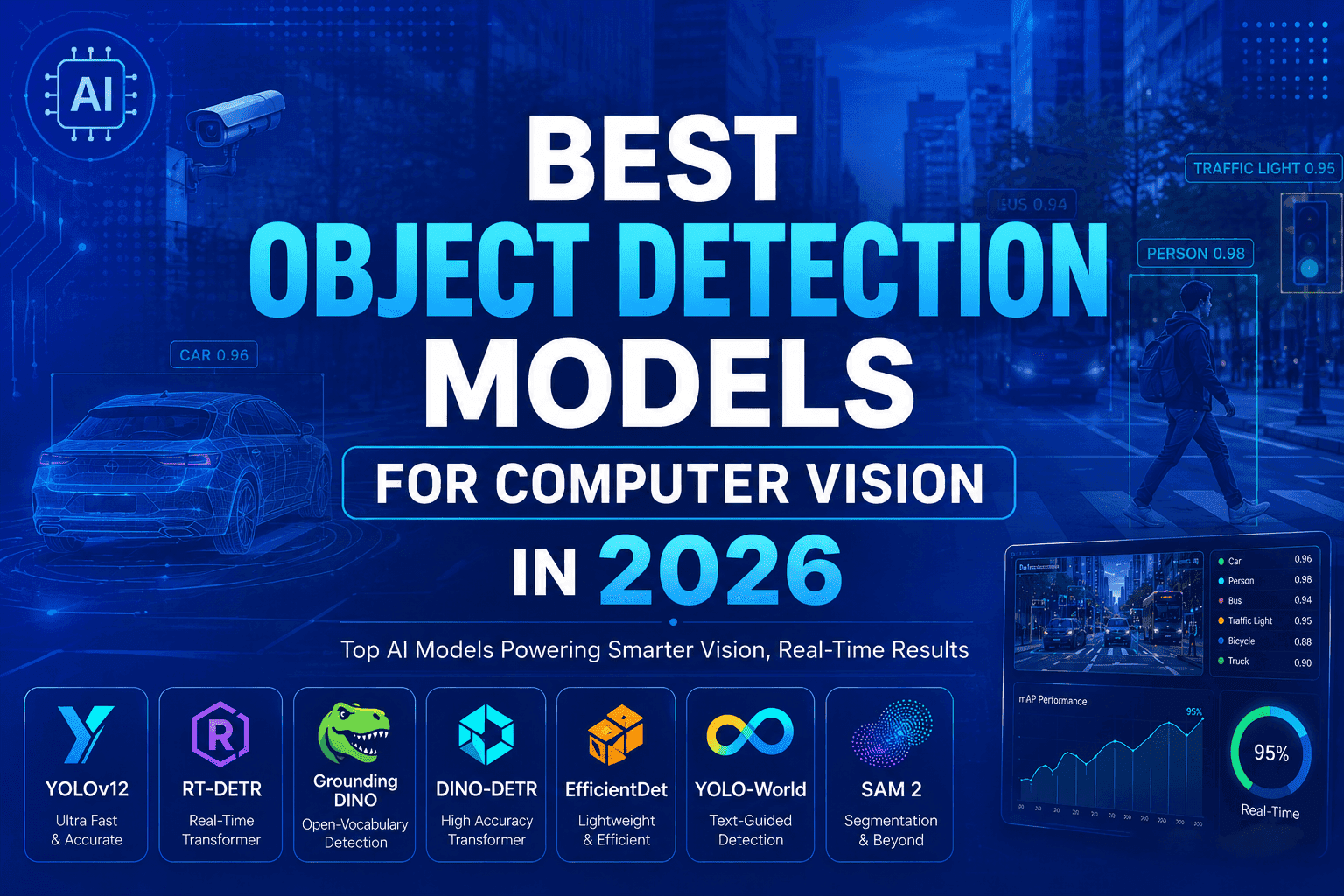
Introduction Object detection has become one of the most important technologies in modern artificial intelligence. From autonomous vehicles and smart surveillance systems to healthcare diagnostics and retail analytics, object detection models enable machines to identify, classify, and locate objects within images and videos with remarkable precision. As we move into 2026, object detection technology continues to evolve rapidly. Traditional convolutional neural network (CNN) architectures are increasingly being combined with transformer-based models, foundation models, and multimodal AI systems. This evolution has significantly improved detection accuracy, speed, scalability, and adaptability across industries. In this comprehensive guide, we explore the best object detection models for computer vision in 2026, compare their strengths and limitations, and help organizations choose the right model for their AI applications. What Is Object Detection? Object detection is a computer vision task that identifies and locates objects within an image or video stream. Unlike image classification, which assigns a label to an entire image, object detection provides: Object category Bounding box coordinates Confidence score Multiple object recognition in a single image For example, an object detection system analyzing a street scene can detect: Cars Pedestrians Traffic lights Bicycles Road signs all simultaneously. Why Object Detection Matters in 2026 Organizations increasingly rely on object detection to automate visual understanding tasks. Major applications include: Autonomous Vehicles Vehicle detection Lane detection Pedestrian tracking Traffic sign recognition Healthcare Tumor detection Medical imaging analysis Surgical assistance Retail Shelf monitoring Customer analytics Inventory management Manufacturing Quality inspection Defect detection Safety monitoring Agriculture Crop monitoring Weed detection Livestock tracking Security and Surveillance Intrusion detection Facial recognition support Anomaly detection As these industries expand their AI capabilities, choosing the right object detection model becomes critical. Key Evaluation Metrics for Object Detection Models Before comparing models, it is important to understand the metrics commonly used. Mean Average Precision (mAP) Measures detection accuracy across different classes. Higher mAP indicates better performance. Frames Per Second (FPS) Measures inference speed. Higher FPS is essential for real-time applications. Latency Time required to process a single image. Lower latency improves responsiveness. Model Size Important for edge deployment and mobile devices. Computational Cost Determines hardware requirements and deployment expenses. 1. YOLOv12 – The Leading Real-Time Detection Model YOLO (You Only Look Once) remains one of the most popular object detection families. YOLOv12 represents a significant evolution in speed, accuracy, and efficiency. Key Advantages Extremely fast inference Excellent real-time performance High mAP scores Edge-device friendly Simplified deployment Best Use Cases Autonomous robots Smart cameras Drones Traffic monitoring Retail analytics Strengths Low latency High throughput Strong balance of speed and accuracy Limitations May struggle with extremely small objects compared to transformer-based models 2. RT-DETR – The Best Real-Time Transformer Detector RT-DETR has emerged as one of the strongest transformer-based object detection models. Unlike traditional DETR architectures, RT-DETR is optimized for real-time applications. Key Features End-to-end detection No NMS requirement Transformer architecture Fast inference Advantages Superior accuracy Cleaner detection pipeline Excellent scalability Best Applications Autonomous driving Industrial automation Smart cities Video analytics RT-DETR is expected to remain a top choice throughout 2026. 3. Grounding DINO – Best Open-Vocabulary Detector Grounding DINO represents a major shift toward open-world object detection. Instead of detecting only predefined classes, it can detect objects based on natural language prompts. Example Prompt: “Find all red motorcycles.” The model can locate motorcycles without specific retraining. Advantages Open-vocabulary detection Language-guided recognition Foundation model integration Applications Robotics Search systems Visual assistants Security systems Grounding DINO is becoming essential for next-generation AI applications. 4. DINO-DETR – High-Accuracy Transformer Detection DINO improved the original DETR architecture significantly. It delivers state-of-the-art detection performance across many benchmark datasets. Strengths Exceptional accuracy Better training convergence Strong small-object detection Ideal Applications Research Medical imaging Satellite imagery Precision manufacturing Trade-Off Requires more computational resources than YOLO models. 5. EfficientDet – Best for Resource-Constrained Deployments EfficientDet remains highly relevant because of its efficiency. It combines: EfficientNet backbone BiFPN architecture Compound scaling Benefits Small model size Low hardware requirements Excellent mobile deployment Best Applications Smartphones IoT devices Embedded systems Edge AI Organizations seeking cost-effective deployment still benefit from EfficientDet. 6. Faster R-CNN – The Reliable Industry Standard Although newer architectures have emerged, Faster R-CNN continues to serve as a benchmark detector. Advantages High accuracy Mature ecosystem Strong community support Common Uses Academic research Medical applications High-precision detection tasks Limitation Slower than YOLO and RT-DETR. 7. CenterNet2 – Anchor-Free Detection Excellence CenterNet2 advances anchor-free object detection. Instead of relying on predefined anchors, it identifies object centers directly. Benefits Simpler architecture Better generalization Reduced hyperparameter tuning Applications Autonomous driving Industrial inspection Smart surveillance Anchor-free approaches continue gaining popularity in 2026. 8. YOLO-World – Open-Vocabulary Real-Time Detection YOLO-World combines YOLO speed with open-vocabulary capabilities. It bridges the gap between traditional object detectors and foundation models. Advantages Real-time inference Text-guided detection Flexible deployment Ideal For Robotics Visual search Dynamic environments YOLO-World is becoming one of the most exciting innovations in computer vision. 9. OWL-ViT – Foundation Model-Based Detection OWL-ViT leverages vision transformers and language understanding. It can recognize thousands of object categories without task-specific retraining. Benefits Zero-shot detection Flexible recognition Strong generalization Applications Research Enterprise AI Advanced robotics Foundation models like OWL-ViT are redefining object detection capabilities. 10. Segment Anything Model (SAM 2) for Detection and Segmentation While primarily a segmentation model, SAM 2 increasingly supports detection workflows. Why It Matters Traditional detectors provide bounding boxes. SAM 2 provides: Precise object masks Interactive segmentation Better visual understanding Use Cases Medical imaging Autonomous systems Content generation Geospatial analysis Many organizations combine SAM 2 with object detectors for enhanced performance. Comparison of Top Object Detection Models in 2026 Model Accuracy Speed Real-Time Open Vocabulary Edge Deployment YOLOv12 Excellent Excellent Yes Limited Excellent RT-DETR Excellent Very High Yes No Good Grounding DINO Excellent Moderate Limited Yes Moderate DINO-DETR Outstanding Moderate Limited No Moderate EfficientDet Good High Yes No Excellent Faster R-CNN Excellent Moderate No No Moderate CenterNet2 Very Good High Yes No Good YOLO-World Excellent High Yes Yes Good OWL-ViT Excellent Moderate Limited Yes Moderate SAM 2 Outstanding Moderate Partial
Introduction Artificial Intelligence has evolved rapidly over the past few years, transforming industries, workflows, and digital experiences. Among the most talked-about technologies today are AI Agents and Generative AI. While many people use these terms interchangeably, they represent two distinct categories of artificial intelligence with different purposes, capabilities, and business impacts. Generative AI became globally recognized through tools like OpenAI’s ChatGPT, image generators, and AI-powered content creation platforms. Meanwhile, AI agents are emerging as autonomous systems capable of reasoning, planning, decision-making, and executing tasks with minimal human intervention. Understanding the difference between AI agents and generative AI is essential for businesses, developers, and organizations looking to implement modern AI solutions effectively. In this comprehensive guide, we will explore: What generative AI is What AI agents are Core differences between the two Real-world applications Advantages and limitations How they work together Future trends shaping AI automation What Is Generative AI? Generative AI refers to artificial intelligence systems designed to create new content based on patterns learned from massive datasets. These systems generate outputs such as: Text Images Audio Videos Code Designs Popular examples include: OpenAI ChatGPT Google Gemini Anthropic Claude Midjourney Adobe Firefly Generative AI models rely heavily on deep learning architectures such as: Large Language Models (LLMs) Diffusion Models Transformer Networks Generative Adversarial Networks (GANs) These systems predict the next word, pixel, sound, or pattern based on training data. How Generative AI Works Generative AI models are trained using enormous datasets containing billions of examples. During training, the AI learns: Language structures Semantic relationships Visual patterns Coding syntax User behavior patterns For example, a text-based generative AI model predicts the most likely next word in a sentence. If a user asks: “Write a marketing email for a SaaS product” The AI generates content based on statistical patterns learned during training. Main Features of Generative AI 1. Content Creation Generative AI excels at producing: Blog articles Social media posts Product descriptions Images Marketing campaigns Source code 2. Human-Like Responses Modern LLMs simulate conversational interactions with impressive fluency. 3. Creativity Enhancement Generative AI supports brainstorming, ideation, and design generation. 4. Fast Output Generation Tasks that once took hours can now be completed in seconds. 5. Multimodal Capabilities Many advanced models process: Text Images Audio Video simultaneously What Are AI Agents? AI agents are autonomous systems that can: Observe environments Analyze situations Make decisions Plan actions Execute tasks Learn from feedback Unlike generative AI, which primarily creates content, AI agents are designed to act independently toward achieving goals. AI agents can integrate: LLMs APIs Databases Software tools Automation workflows Memory systems Their primary objective is task execution rather than content generation alone. How AI Agents Work AI agents typically operate using a loop: Observe Reason Plan Act Evaluate Repeat For example, an AI customer support agent may: Read incoming tickets Categorize requests Search company databases Draft responses Escalate complex issues Update CRM systems All with minimal human intervention. Core Components of AI Agents 1. Reasoning Engine Determines what actions to take. 2. Memory Stores previous interactions and context. 3. Planning System Breaks goals into smaller executable steps. 4. Tool Integration Uses external software, APIs, and applications. 5. Autonomous Decision-Making Acts independently based on objectives. AI Agents vs Generative AI: Key Differences AI Agents vs Generative AI Comparison of major capabilities between AI agents and generative AI systems. Feature Generative AI AI Agents Primary Purpose Content generation Autonomous task execution Human Dependency High Lower Memory Limited Persistent memory possible Decision-Making Minimal Advanced Tool Usage Usually standalone Integrates tools & APIs Workflow Automation Limited Extensive Autonomy Reactive Proactive Goal-Oriented Sometimes Strongly goal-driven Real-World Examples of Generative AI Content Marketing Businesses use generative AI for: SEO blogs Email campaigns Ad copy Product descriptions Software Development AI coding assistants generate: Code snippets Documentation Bug fixes Test cases Examples include: GitHub Copilot OpenAI Codex Design and Media AI-generated visuals, videos, and audio are transforming creative industries. Customer Support Chatbots powered by generative AI answer customer questions in natural language. Real-World Examples of AI Agents Autonomous Customer Support Agents AI agents can: Resolve tickets Access databases Trigger workflows Schedule follow-ups AI Research Agents Agents gather information from multiple sources and summarize findings automatically. Sales Automation Agents AI agents can: Qualify leads Send outreach emails Update CRMs Schedule meetings Software Engineering Agents Advanced coding agents can: Write code Run tests Debug applications Deploy software Benefits of Generative AI Increased Productivity Teams generate content significantly faster. Lower Operational Costs Automation reduces manual creative workloads. Enhanced Creativity AI assists with ideation and innovation. Scalability Businesses can produce content at scale. Limitations of Generative AI Hallucinations Generative AI may create inaccurate or fabricated information. Lack of True Understanding Models predict patterns rather than truly understanding concepts. Limited Autonomy Most generative AI systems require prompts and human supervision. Context Limitations Long-term memory is often weak or unavailable. Benefits of AI Agents End-to-End Automation AI agents execute complete workflows autonomously. Continuous Learning Agents can improve through feedback and interaction. Operational Efficiency Businesses reduce repetitive manual tasks. Intelligent Decision-Making Agents analyze data and optimize outcomes. Limitations of AI Agents Complexity Building robust AI agents is technically challenging. Security Risks Autonomous systems require strong governance and safeguards. Infrastructure Requirements AI agents often require: APIs Databases Orchestration systems Monitoring frameworks Reliability Concerns Poorly designed agents may make incorrect decisions. How AI Agents and Generative AI Work Together In reality, many advanced AI systems combine both technologies. Generative AI often acts as the “brain” for AI agents by providing: Natural language understanding Content generation Reasoning support Meanwhile, AI agents provide: Autonomy Planning Action execution Workflow management For example: An AI agent receives a customer support request Uses generative AI to draft a response Accesses databases Updates support tickets Sends emails automatically This combination is driving the next wave of intelligent automation. Industries Adopting AI Agents and Generative AI Healthcare Hospitals use AI for: Medical documentation Diagnostic assistance Patient support automation Finance Banks deploy AI for: Fraud detection Financial analysis Customer service automation E-Commerce Retailers use AI for: