Introduction – Why YOLO Changed Everything
Before YOLO, computers did not “see” the world the way humans do.
Object detection systems were careful, slow, and fragmented. They first proposed regions that might contain objects, then classified each region separately. Detection worked—but it felt like solving a puzzle one piece at a time.
In 2015, YOLO—You Only Look Once—introduced a radical idea:
What if we detect everything in one single forward pass?
Instead of multiple stages, YOLO treated detection as a single regression problem from pixels to bounding boxes and class probabilities.
This guide walks through how to implement YOLO completely from scratch in PyTorch, covering:
Mathematical formulation
Network architecture
Target encoding
Loss implementation
Training on COCO-style data
mAP evaluation
Visualization & debugging
Inference with NMS
Anchor-box extension
1) What YOLO means (and what we’ll build)
YOLO (You Only Look Once) is a family of object detection models that predict bounding boxes and class probabilities in one forward pass. Unlike older multi-stage pipelines (proposal → refine → classify), YOLO-style detectors are dense predictors: they predict candidate boxes at many locations and scales, then filter them.
There are two “eras” of YOLO-like detectors:
YOLOv1-style (grid cells, no anchors): each grid cell predicts a few boxes directly.
Anchor-based YOLO (YOLOv2/3 and many derivatives): each grid cell predicts offsets relative to pre-defined anchor shapes; multiple scales predict small/medium/large objects.
What we’ll implement
A modern, anchor-based YOLO-style detector with:
Multi-scale heads (e.g., 3 scales)
Anchor matching (target assignment)
Loss with box regression + objectness + classification
Decoding + NMS
mAP evaluation
COCO/custom dataset training support
We’ll keep the architecture understandable rather than exotic. You can later swap in a bigger backbone easily.

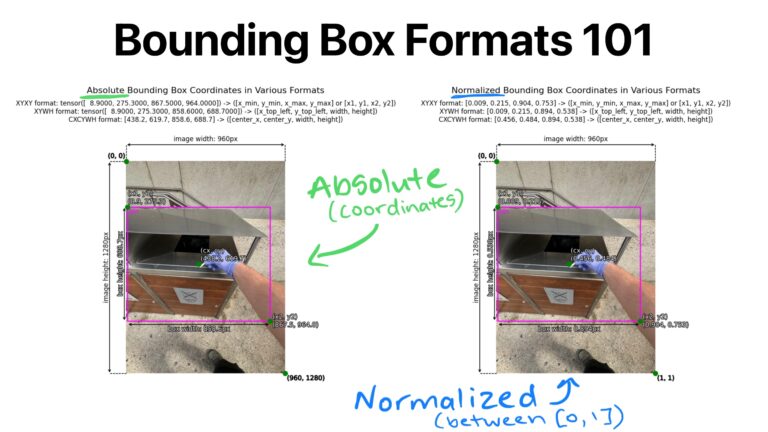
2) Bounding box formats and coordinate systems
You must be consistent. Most training bugs come from box format confusion.
Common box formats:
XYXY:
(x1, y1, x2, y2)top-left & bottom-rightXYWH:
(cx, cy, w, h)center and sizeNormalized: coordinates in
[0, 1]relative to image sizeAbsolute: pixel coordinates
Recommended internal convention
Store dataset annotations as absolute XYXY in pixels.
Convert to normalized only if needed, but keep one standard.
Why XYXY is nice:
Intersection/union is straightforward.
Clamping to image bounds is simple.
3) IoU, GIoU, DIoU, CIoU
IoU (Intersection over Union) is the standard overlap metric:
IoU=∣A∩B∣/∣A∪B∣
But IoU has a problem: if boxes don’t overlap, IoU = 0, gradient can be weak. Modern detectors often use improved regression losses:
GIoU: adds penalty for non-overlapping boxes based on smallest enclosing box
DIoU: penalizes center distance
CIoU: DIoU + aspect ratio consistency
Practical rule:
If you want a strong default: CIoU for box regression.
If you want simpler: GIoU works well too.
We’ll implement IoU + CIoU (with safe numerics).
4) Anchor-based YOLO: grids, anchors, predictions
A YOLO head predicts at each grid location. Suppose a feature map is S x S (e.g., 80×80). Each cell can predict A anchors (e.g., 3). For each anchor, prediction is:
Box offsets:
tx, ty, tw, thObjectness logit:
toClass logits:
tc1..tcC
So tensor shape per scale is:(B, A*(5+C), S, S) or (B, A, S, S, 5+C) after reshaping.
How offsets become real boxes
A common YOLO-style decode (one of several valid variants):
bx = (sigmoid(tx) + cx) / Sby = (sigmoid(ty) + cy) / Sbw = (anchor_w * exp(tw)) / img_w(or normalized by S)bh = (anchor_h * exp(th)) / img_h
Where (cx, cy) is the integer grid coordinate.
Important: Your encode/decode must match your target assignment encoding.
5) Dataset preparation
Annotation formats
Your custom dataset can be:
COCO JSON
Pascal VOC XML
YOLO txt (class cx cy w h normalized)
We’ll support a generic internal representation:
Each sample returns:
image: Tensor [3, H, W]targets: Tensor [N, 6]with columns:[class, x1, y1, x2, y2, image_index(optional)]
Augmentations
For object detection, augmentations must transform boxes too:
Resize / letterbox
Random horizontal flip
Color jitter
Random affine (optional)
Mosaic/mixup (advanced; optional)
To keep this guide implementable without fragile geometry, we’ll do:
resize/letterbox
random flip
HSV jitter (optional)
6) Building blocks: Conv-BN-Act, residuals, necks
A clean baseline module:
Conv2d -> BatchNorm2d -> SiLU
SiLU (a.k.a. Swish) is common in YOLOv5-like families; LeakyReLU is common in YOLOv3.
We can optionally add residual blocks for a stronger backbone, but even a small backbone can work to validate the pipeline.
7) Model design
A typical structure:
Backbone: extracts feature maps at multiple strides (8, 16, 32)
Neck: combines features (FPN / PAN)
Head: predicts detection outputs per scale
We’ll implement a lightweight backbone that produces 3 feature maps and a simple FPN-like neck.
8) Decoding predictions
At inference:
Reshape outputs per scale to
(B, A, S, S, 5+C)Apply sigmoid to center offsets + objectness (and often class probs)
Convert to XYXY in pixel coordinates
Flatten all scales into one list of candidate boxes
Filter by confidence threshold
Apply NMS per class (or class-agnostic NMS)
9) Target assignment (matching GT to anchors)
This is the heart of anchor-based YOLO.
For each ground-truth box:
Determine which scale(s) should handle it (based on size / anchor match).
For the chosen scale, compute IoU between GT box size and each anchor size (in that scale’s coordinate system).
Select best anchor (or top-k anchors).
Compute the grid cell index from the GT center.
Fill the target tensors at
[anchor, gy, gx]with:box regression targets
objectness = 1
class target
Encoding regression targets
If using decode:
bx = (sigmoid(tx) + cx)/S
then target fortxissigmoid^-1(bx*S - cx)but that’s messy.
Instead, YOLO-style training often directly supervises:
tx_target = bx*S - cx(a value in [0,1]) and trains with BCE on sigmoid output, or MSE on raw.tw_target = log(bw / anchor_w)(in pixels or normalized units)
We’ll implement a stable variant:
predict
pxy = sigmoid(tx,ty)and supervise pxy with BCE/MSE to match fractional offsetspredict
pwh = exp(tw,th)*anchorand supervise with CIoU on decoded boxes (recommended)
That’s simpler: do regression loss on decoded boxes, not on tw/th directly.
10) Loss functions
YOLO-style loss usually has:
Box loss: CIoU/GIoU between predicted box and GT box at responsible locations
Objectness loss: BCEWithLogits on objectness logit
Class loss: BCEWithLogits (multi-label) or CE (single-label)
For single-label classification (one class per object), either works:
BCEWithLogits with one-hot targets (common in YOLO)
CrossEntropyLoss on class logits at positive locations (also fine)
We’ll use BCEWithLogits for both objectness and classes for consistency.
Handling negatives
You’ll have far more negative (no object) positions. You can:
Use a lower weight for negative objectness
Or apply focal loss (optional)
We’ll implement:
objectness loss with positive and negative weights.
11) Training loop
Key features for stability/performance:
AMP (torch.cuda.amp)
Gradient clipping (optional)
EMA weights (optional but helpful)
LR scheduler (cosine or step)
Warmup for first few epochs/steps
Use this on screenshots from Playwright:
12) NMS
Non-Max Suppression removes overlapping duplicates. Typical procedure:
Sort boxes by confidence
Iterate highest conf, suppress boxes with IoU > threshold
Use class-wise NMS for multi-class detection.
13) mAP evaluation
Mean Average Precision requires:
For each class, compute precision-recall curve at IoU thresholds
Integrate area under curve (AP)
Average across classes (mAP)
COCO uses mAP across IoU thresholds 0.50 to 0.95 step 0.05
We’ll implement:
mAP@0.5
and optionally COCO-style mAP@[.5:.95]
14) Visualization
Before training seriously, visualize:
target assignments per scale
decoded predictions after a few iterations
NMS outputs
This catches 80% of “my model doesn’t learn” issues.
15) Full Core Implementation (Reference Code)
Below is a compact but complete set of core files you can place into a repo. It’s not “tiny,” but it’s readable and engineered for correctness.
15.1 Repo structure
yolo_scratch/
README.md
train.py
eval.py
predict.py
yolo/
__init__.py
model.py
modules.py
loss.py
assigner.py
box_ops.py
nms.py
metrics.py
data.py
transforms.py
utils.py
configs/
coco.yaml
custom.yaml
yolo_scratch/
README.md
train.py
eval.py
predict.py
yolo/
__init__.py
model.py
modules.py
loss.py
assigner.py
box_ops.py
nms.py
metrics.py
data.py
transforms.py
utils.py
configs/
coco.yaml
custom.yaml
15.2 yolo/box_ops.py
import torch
def xyxy_to_xywh(boxes: torch.Tensor) -> torch.Tensor:
# boxes: [..., 4]
x1, y1, x2, y2 = boxes.unbind(-1)
cx = (x1 + x2) * 0.5
cy = (y1 + y2) * 0.5
w = (x2 - x1).clamp(min=0)
h = (y2 - y1).clamp(min=0)
return torch.stack([cx, cy, w, h], dim=-1)
def xywh_to_xyxy(boxes: torch.Tensor) -> torch.Tensor:
cx, cy, w, h = boxes.unbind(-1)
half_w = w * 0.5
half_h = h * 0.5
x1 = cx - half_w
y1 = cy - half_h
x2 = cx + half_w
y2 = cy + half_h
return torch.stack([x1, y1, x2, y2], dim=-1)
def box_iou_xyxy(boxes1: torch.Tensor, boxes2: torch.Tensor, eps: float = 1e-9) -> torch.Tensor:
# boxes1: [N,4], boxes2: [M,4]
x11, y11, x12, y12 = boxes1[:, 0], boxes1[:, 1], boxes1[:, 2], boxes1[:, 3]
x21, y21, x22, y22 = boxes2[:, 0], boxes2[:, 1], boxes2[:, 2], boxes2[:, 3]
inter_x1 = torch.maximum(x11[:, None], x21[None, :])
inter_y1 = torch.maximum(y11[:, None], y21[None, :])
inter_x2 = torch.minimum(x12[:, None], x22[None, :])
inter_y2 = torch.minimum(y12[:, None], y22[None, :])
inter_w = (inter_x2 - inter_x1).clamp(min=0)
inter_h = (inter_y2 - inter_y1).clamp(min=0)
inter = inter_w * inter_h
area1 = (x12 - x11).clamp(min=0) * (y12 - y11).clamp(min=0)
area2 = (x22 - x21).clamp(min=0) * (y22 - y21).clamp(min=0)
union = area1[:, None] + area2[None, :] - inter
return inter / (union + eps)
def ciou_loss_xyxy(pred: torch.Tensor, target: torch.Tensor, eps: float = 1e-7) -> torch.Tensor:
"""
pred, target: [N,4] in xyxy
Returns: [N] CIoU loss = 1 - CIoU
"""
# IoU
iou = box_iou_xyxy(pred, target).diag() # [N]
# centers and sizes
p = xyxy_to_xywh(pred)
t = xyxy_to_xywh(target)
pcx, pcy, pw, ph = p.unbind(-1)
tcx, tcy, tw, th = t.unbind(-1)
# center distance
center_dist2 = (pcx - tcx) ** 2 + (pcy - tcy) ** 2
# smallest enclosing box diagonal squared
x1 = torch.minimum(pred[:, 0], target[:, 0])
y1 = torch.minimum(pred[:, 1], target[:, 1])
x2 = torch.maximum(pred[:, 2], target[:, 2])
y2 = torch.maximum(pred[:, 3], target[:, 3])
c2 = (x2 - x1) ** 2 + (y2 - y1) ** 2 + eps
diou = iou - center_dist2 / c2
# aspect ratio penalty
v = (4 / (torch.pi ** 2)) * (torch.atan(tw / (th + eps)) - torch.atan(pw / (ph + eps))) ** 2
with torch.no_grad():
alpha = v / (1 - iou + v + eps)
ciou = diou - alpha * v
return 1 - ciou.clamp(min=-1.0, max=1.0)
15.3 yolo/nms.py
import torch
from .box_ops import box_iou_xyxy
def nms_xyxy(boxes: torch.Tensor, scores: torch.Tensor, iou_thresh: float = 0.5) -> torch.Tensor:
"""
boxes: [N,4], scores: [N]
returns indices kept
"""
if boxes.numel() == 0:
return torch.empty((0,), dtype=torch.long, device=boxes.device)
idxs = scores.argsort(descending=True)
keep = []
while idxs.numel() > 0:
i = idxs[0]
keep.append(i)
if idxs.numel() == 1:
break
rest = idxs[1:]
ious = box_iou_xyxy(boxes[i].unsqueeze(0), boxes[rest]).squeeze(0)
idxs = rest[ious <= iou_thresh]
return torch.stack(keep)
def batched_nms_xyxy(boxes, scores, labels, iou_thresh=0.5):
"""
Class-wise NMS by offsetting boxes or by filtering per class.
Here: filter per class (clear and correct).
"""
keep_all = []
for c in labels.unique():
mask = labels == c
keep = nms_xyxy(boxes[mask], scores[mask], iou_thresh)
keep_all.append(mask.nonzero(as_tuple=False).squeeze(1)[keep])
if not keep_all:
return torch.empty((0,), dtype=torch.long, device=boxes.device)
return torch.cat(keep_all)
15.4 yolo/modules.py
import torch
import torch.nn as nn
class ConvBNAct(nn.Module):
def __init__(self, in_ch, out_ch, k=3, s=1, p=None, act=True):
super().__init__()
if p is None:
p = k // 2
self.conv = nn.Conv2d(in_ch, out_ch, k, s, p, bias=False)
self.bn = nn.BatchNorm2d(out_ch)
self.act = nn.SiLU(inplace=True) if act else nn.Identity()
def forward(self, x):
return self.act(self.bn(self.conv(x)))
class Residual(nn.Module):
def __init__(self, ch):
super().__init__()
self.block = nn.Sequential(
ConvBNAct(ch, ch, 1, 1),
ConvBNAct(ch, ch, 3, 1),
)
def forward(self, x):
return x + self.block(x)
class CSPBlock(nn.Module):
"""
Light CSP-like block: split channels, apply residuals on one branch, then concat.
"""
def __init__(self, ch, n=1):
super().__init__()
c_ = ch // 2
self.conv1 = ConvBNAct(ch, c_, 1, 1)
self.conv2 = ConvBNAct(ch, c_, 1, 1)
self.m = nn.Sequential(*[Residual(c_) for _ in range(n)])
self.conv3 = ConvBNAct(2 * c_, ch, 1, 1)
def forward(self, x):
y1 = self.m(self.conv1(x))
y2 = self.conv2(x)
return self.conv3(torch.cat([y1, y2], dim=1))
15.5 yolo/model.py
import torch
import torch.nn as nn
from .modules import ConvBNAct, CSPBlock
class TinyBackbone(nn.Module):
"""
Produces 3 feature maps at strides 8, 16, 32.
"""
def __init__(self, in_ch=3, base=32):
super().__init__()
self.stem = nn.Sequential(
ConvBNAct(in_ch, base, 3, 2), # stride 2
ConvBNAct(base, base*2, 3, 2), # stride 4
CSPBlock(base*2, n=1),
)
self.stage3 = nn.Sequential(
ConvBNAct(base*2, base*4, 3, 2), # stride 8
CSPBlock(base*4, n=2),
)
self.stage4 = nn.Sequential(
ConvBNAct(base*4, base*8, 3, 2), # stride 16
CSPBlock(base*8, n=2),
)
self.stage5 = nn.Sequential(
ConvBNAct(base*8, base*16, 3, 2), # stride 32
CSPBlock(base*16, n=1),
)
def forward(self, x):
x = self.stem(x)
p3 = self.stage3(x)
p4 = self.stage4(p3)
p5 = self.stage5(p4)
return p3, p4, p5
class SimpleFPN(nn.Module):
def __init__(self, ch3, ch4, ch5, out_ch=128):
super().__init__()
self.lat5 = ConvBNAct(ch5, out_ch, 1, 1)
self.lat4 = ConvBNAct(ch4, out_ch, 1, 1)
self.lat3 = ConvBNAct(ch3, out_ch, 1, 1)
self.out4 = ConvBNAct(out_ch, out_ch, 3, 1)
self.out3 = ConvBNAct(out_ch, out_ch, 3, 1)
def forward(self, p3, p4, p5):
p5 = self.lat5(p5)
p4 = self.lat4(p4) + torch.nn.functional.interpolate(p5, scale_factor=2, mode="nearest")
p3 = self.lat3(p3) + torch.nn.functional.interpolate(p4, scale_factor=2, mode="nearest")
p4 = self.out4(p4)
p3 = self.out3(p3)
return p3, p4, p5
class DetectHead(nn.Module):
def __init__(self, in_ch, num_anchors, num_classes):
super().__init__()
self.num_anchors = num_anchors
self.num_classes = num_classes
self.pred = nn.Conv2d(in_ch, num_anchors * (5 + num_classes), 1, 1, 0)
def forward(self, x):
return self.pred(x)
class YOLO(nn.Module):
def __init__(self, num_classes, anchors, base=32):
"""
anchors: list of 3 scales, each is list of (w,h) in pixels for the model input size (e.g., 640)
e.g. [
[(10,13),(16,30),(33,23)], # stride 8
[(30,61),(62,45),(59,119)], # stride 16
[(116,90),(156,198),(373,326)] # stride 32
]
"""
super().__init__()
self.num_classes = num_classes
self.anchors = anchors
self.backbone = TinyBackbone(in_ch=3, base=base)
# backbone channels: p3=base*4, p4=base*8, p5=base*16
self.fpn = SimpleFPN(base*4, base*8, base*16, out_ch=base*4)
na = len(anchors[0])
self.head3 = DetectHead(base*4, na, num_classes)
self.head4 = DetectHead(base*4, na, num_classes)
self.head5 = DetectHead(base*4, na, num_classes)
def forward(self, x):
p3, p4, p5 = self.backbone(x)
f3, f4, f5 = self.fpn(p3, p4, p5)
o3 = self.head3(f3)
o4 = self.head4(f4)
o5 = self.head5(f5)
return [o3, o4, o5]
15.6 yolo/assigner.py (target assignment)
import torch
def build_targets(
targets, # list of length B, each: Tensor [Ni, 5] -> (cls, x1, y1, x2, y2) in pixels
anchors, # per scale: list of (w,h) in pixels at input size
strides, # [8,16,32]
img_size, # int, e.g. 640
num_classes,
device
):
"""
Returns per-scale target tensors:
tbox: list of [B, A, S, S, 4] in xyxy pixels
tobj: list of [B, A, S, S] (0/1)
tcls: list of [B, A, S, S, C] one-hot
indices: list of tuples for positives (b, a, gy, gx)
"""
B = len(targets)
out = []
indices_all = []
for scale_idx, (anc, stride) in enumerate(zip(anchors, strides)):
S = img_size // stride
A = len(anc)
tbox = torch.zeros((B, A, S, S, 4), device=device)
tobj = torch.zeros((B, A, S, S), device=device)
tcls = torch.zeros((B, A, S, S, num_classes), device=device)
indices = []
anc_wh = torch.tensor(anc, device=device, dtype=torch.float32) # [A,2]
for b in range(B):
if targets[b].numel() == 0:
continue
gt = targets[b].to(device)
cls = gt[:, 0].long()
x1y1 = gt[:, 1:3]
x2y2 = gt[:, 3:5]
gxy = (x1y1 + x2y2) * 0.5
gwh = (x2y2 - x1y1).clamp(min=1.0)
# pick best anchor by IoU of width/height (approx)
# IoU(wh) = min(w)/max(w) * min(h)/max(h)
wh = gwh[:, None, :] # [N,1,2]
min_wh = torch.minimum(wh, anc_wh[None, :, :])
max_wh = torch.maximum(wh, anc_wh[None, :, :])
iou_wh = (min_wh[..., 0] / max_wh[..., 0]) * (min_wh[..., 1] / max_wh[..., 1]) # [N,A]
best_a = torch.argmax(iou_wh, dim=1) # [N]
# grid cell
gx = (gxy[:, 0] / stride).clamp(min=0, max=S-1e-3)
gy = (gxy[:, 1] / stride).clamp(min=0, max=S-1e-3)
gi = gx.long()
gj = gy.long()
for i in range(gt.shape[0]):
a = best_a[i].item()
x1, y1, x2, y2 = gt[i, 1:].tolist()
# assign
tobj[b, a, gj[i], gi[i]] = 1.0
tbox[b, a, gj[i], gi[i]] = torch.tensor([x1, y1, x2, y2], device=device)
tcls[b, a, gj[i], gi[i], cls[i]] = 1.0
indices.append((b, a, gj[i].item(), gi[i].item()))
out.append((tbox, tobj, tcls))
indices_all.append(indices)
return out, indices_all
15.7 yolo/loss.py
import torch
import torch.nn as nn
from .box_ops import xywh_to_xyxy, ciou_loss_xyxy
class YOLOLoss(nn.Module):
def __init__(self, anchors, strides, num_classes, img_size,
lambda_box=7.5, lambda_obj=1.0, lambda_cls=1.0,
obj_pos_weight=1.0, obj_neg_weight=0.5):
super().__init__()
self.anchors = anchors
self.strides = strides
self.num_classes = num_classes
self.img_size = img_size
self.lambda_box = lambda_box
self.lambda_obj = lambda_obj
self.lambda_cls = lambda_cls
self.bce = nn.BCEWithLogitsLoss(reduction="none")
self.obj_pos_weight = obj_pos_weight
self.obj_neg_weight = obj_neg_weight
def decode_scale(self, pred, scale_idx):
"""
pred: [B, A*(5+C), S, S]
returns:
boxes_xyxy: [B, A, S, S, 4] in pixels
obj_logit: [B, A, S, S]
cls_logit: [B, A, S, S, C]
"""
B, _, S, _ = pred.shape
A = len(self.anchors[scale_idx])
C = self.num_classes
stride = self.strides[scale_idx]
pred = pred.view(B, A, 5 + C, S, S).permute(0, 1, 3, 4, 2).contiguous()
# [B, A, S, S, 5+C]
tx_ty = pred[..., 0:2]
tw_th = pred[..., 2:4]
obj = pred[..., 4]
cls = pred[..., 5:]
# grid
gy, gx = torch.meshgrid(torch.arange(S, device=pred.device),
torch.arange(S, device=pred.device), indexing="ij")
grid = torch.stack([gx, gy], dim=-1).float() # [S,S,2]
# anchors
anc = torch.tensor(self.anchors[scale_idx], device=pred.device).float() # [A,2]
anc = anc.view(1, A, 1, 1, 2)
# decode center
pxy = (tx_ty.sigmoid() + grid.view(1, 1, S, S, 2)) * stride # pixels
# decode wh
pwh = (tw_th.exp() * anc) # pixels
boxes_xywh = torch.cat([pxy, pwh], dim=-1)
boxes_xyxy = xywh_to_xyxy(boxes_xywh)
return boxes_xyxy, obj, cls
def forward(self, preds, targets_per_scale):
"""
preds: list of 3 scale outputs
targets_per_scale: list of (tbox, tobj, tcls) per scale
"""
total_box = torch.tensor(0.0, device=preds[0].device)
total_obj = torch.tensor(0.0, device=preds[0].device)
total_cls = torch.tensor(0.0, device=preds[0].device)
for s, pred in enumerate(preds):
tbox, tobj, tcls = targets_per_scale[s]
pbox, pobj_logit, pcls_logit = self.decode_scale(pred, s)
# objectness loss with weighting
obj_loss = self.bce(pobj_logit, tobj)
w = torch.where(tobj > 0.5,
torch.full_like(obj_loss, self.obj_pos_weight),
torch.full_like(obj_loss, self.obj_neg_weight))
total_obj = total_obj + (obj_loss * w).mean()
# positives mask
pos = tobj > 0.5
if pos.any():
# box loss CIoU
pbox_pos = pbox[pos]
tbox_pos = tbox[pos]
box_loss = ciou_loss_xyxy(pbox_pos, tbox_pos).mean()
total_box = total_box + box_loss
# class loss
cls_loss = self.bce(pcls_logit[pos], tcls[pos]).mean()
total_cls = total_cls + cls_loss
loss = self.lambda_box * total_box + self.lambda_obj * total_obj + self.lambda_cls * total_cls
return loss, {"box": total_box.detach(), "obj": total_obj.detach(), "cls": total_cls.detach()}
15.8 yolo/utils.py
import torch
def set_seed(seed=42):
import random, numpy as np
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
class AverageMeter:
def __init__(self):
self.sum = 0.0
self.count = 0
def update(self, v, n=1):
self.sum += float(v) * n
self.count += n
@property
def avg(self):
return self.sum / max(1, self.count)
15.9 yolo/transforms.py (simple letterbox + flip)
import torch
import torchvision.transforms.functional as TF
def letterbox(image, boxes_xyxy, new_size=640):
"""
image: PIL or Tensor [C,H,W]
boxes_xyxy: Tensor [N,4] in pixels
returns resized/padded image and transformed boxes
"""
if not torch.is_tensor(image):
image = TF.to_tensor(image)
c, h, w = image.shape
scale = min(new_size / h, new_size / w)
nh, nw = int(round(h * scale)), int(round(w * scale))
image_resized = TF.resize(image, [nh, nw])
pad_h = new_size - nh
pad_w = new_size - nw
top = pad_h // 2
left = pad_w // 2
image_padded = torch.zeros((c, new_size, new_size), dtype=image.dtype)
image_padded[:, top:top+nh, left:left+nw] = image_resized
if boxes_xyxy.numel() > 0:
boxes = boxes_xyxy.clone()
boxes *= scale
boxes[:, [0, 2]] += left
boxes[:, [1, 3]] += top
else:
boxes = boxes_xyxy
return image_padded, boxes
def random_hflip(image, boxes_xyxy, p=0.5):
if torch.rand(()) > p:
return image, boxes_xyxy
c, h, w = image.shape
image = torch.flip(image, dims=[2]) # flip width
boxes = boxes_xyxy.clone()
if boxes.numel() > 0:
x1 = boxes[:, 0].clone()
x2 = boxes[:, 2].clone()
boxes[:, 0] = (w - x2)
boxes[:, 2] = (w - x1)
return image, boxes
15.10 yolo/data.py (custom dataset skeleton)
import os
import torch
from torch.utils.data import Dataset
from PIL import Image
from .transforms import letterbox, random_hflip
class DetectionDataset(Dataset):
"""
Expects a list of samples where each sample has:
- image_path
- annotations: list of [cls, x1, y1, x2, y2] in pixels
You can write adapters to load COCO or YOLO txt into this format.
"""
def __init__(self, samples, img_size=640, augment=True):
self.samples = samples
self.img_size = img_size
self.augment = augment
def __len__(self):
return len(self.samples)
def __getitem__(self, idx):
s = self.samples[idx]
img = Image.open(s["image_path"]).convert("RGB")
ann = s.get("annotations", [])
if len(ann) > 0:
target = torch.tensor(ann, dtype=torch.float32) # [N,5]
else:
target = torch.zeros((0,5), dtype=torch.float32)
cls = target[:, 0:1]
boxes = target[:, 1:5]
img, boxes = letterbox(img, boxes, self.img_size)
if self.augment:
img, boxes = random_hflip(img, boxes, p=0.5)
# normalize image
img = img.clamp(0, 1)
# pack back
if boxes.numel() > 0:
target = torch.cat([cls, boxes], dim=1)
else:
target = torch.zeros((0,5), dtype=torch.float32)
return img, target
def collate_fn(batch):
images, targets = zip(*batch)
images = torch.stack(images, dim=0)
# targets remains list[Tensor]
return images, list(targets)
15.11 train.py (end-to-end training loop)
import torch
from torch.utils.data import DataLoader
from yolo.model import YOLO
from yolo.loss import YOLOLoss
from yolo.assigner import build_targets
from yolo.utils import set_seed, AverageMeter
from yolo.data import DetectionDataset, collate_fn
def train_one_epoch(model, loss_fn, loader, optimizer, device, anchors, strides, img_size, num_classes, scaler=None):
model.train()
meter = AverageMeter()
for images, targets_list in loader:
images = images.to(device)
# build targets per scale
targets_per_scale, _ = build_targets(
targets_list, anchors=anchors, strides=strides,
img_size=img_size, num_classes=num_classes, device=device
)
targets_per_scale = [(tbox, tobj, tcls) for (tbox, tobj, tcls) in targets_per_scale]
optimizer.zero_grad(set_to_none=True)
if scaler is not None:
with torch.cuda.amp.autocast():
preds = model(images)
loss, logs = loss_fn(preds, targets_per_scale)
scaler.scale(loss).backward()
scaler.step(optimizer)
scaler.update()
else:
preds = model(images)
loss, logs = loss_fn(preds, targets_per_scale)
loss.backward()
optimizer.step()
meter.update(loss.item(), n=images.size(0))
return meter.avg
def main():
set_seed(42)
device = "cuda" if torch.cuda.is_available() else "cpu"
img_size = 640
num_classes = 80 # COCO example
strides = [8, 16, 32]
anchors = [
[(10,13),(16,30),(33,23)],
[(30,61),(62,45),(59,119)],
[(116,90),(156,198),(373,326)]
]
# TODO: load your samples list here
samples = [] # [{"image_path": "...", "annotations": [[cls,x1,y1,x2,y2], ...]}, ...]
ds = DetectionDataset(samples, img_size=img_size, augment=True)
loader = DataLoader(ds, batch_size=8, shuffle=True, num_workers=4, pin_memory=True, collate_fn=collate_fn)
model = YOLO(num_classes=num_classes, anchors=anchors, base=32).to(device)
loss_fn = YOLOLoss(anchors, strides, num_classes, img_size).to(device)
optimizer = torch.optim.AdamW(model.parameters(), lr=2e-4, weight_decay=1e-4)
scaler = torch.cuda.amp.GradScaler() if device == "cuda" else None
for epoch in range(1, 101):
avg_loss = train_one_epoch(model, loss_fn, loader, optimizer, device, anchors, strides, img_size, num_classes, scaler)
print(f"Epoch {epoch:03d} | loss={avg_loss:.4f}")
torch.save(model.state_dict(), "yolo_scratch.pt")
if __name__ == "__main__":
main()
16) Inference: decoding + NMS (predict pipeline)
16.1 Decoding helper (add to yolo/metrics.py or yolo/utils.py)
import torch
from .box_ops import xywh_to_xyxy
from .nms import batched_nms_xyxy
@torch.no_grad()
def decode_predictions(preds, anchors, strides, num_classes, conf_thresh=0.25, iou_thresh=0.5):
"""
preds: list of 3 tensors [B, A*(5+C), S, S]
returns per image: boxes [M,4], scores [M], labels [M]
"""
outputs = []
for b in range(preds[0].shape[0]):
boxes_all = []
scores_all = []
labels_all = []
for s, p in enumerate(preds):
B, _, S, _ = p.shape
A = len(anchors[s])
C = num_classes
stride = strides[s]
x = p[b:b+1].view(1, A, 5+C, S, S).permute(0,1,3,4,2).contiguous()[0] # [A,S,S,5+C]
tx_ty = x[..., 0:2]
tw_th = x[..., 2:4]
obj_logit = x[..., 4]
cls_logit = x[..., 5:]
gy, gx = torch.meshgrid(torch.arange(S, device=p.device),
torch.arange(S, device=p.device), indexing="ij")
grid = torch.stack([gx, gy], dim=-1).float() # [S,S,2]
anc = torch.tensor(anchors[s], device=p.device).float().view(A,1,1,2)
pxy = (tx_ty.sigmoid() + grid) * stride
pwh = tw_th.exp() * anc
boxes_xywh = torch.cat([pxy, pwh], dim=-1) # [A,S,S,4]
boxes_xyxy = xywh_to_xyxy(boxes_xywh)
obj = obj_logit.sigmoid() # [A,S,S]
cls_prob = cls_logit.sigmoid() # [A,S,S,C]
# combine: per-class confidence = obj * cls_prob
conf = obj.unsqueeze(-1) * cls_prob # [A,S,S,C]
conf = conf.view(-1, C)
boxes = boxes_xyxy.view(-1, 4)
scores, labels = conf.max(dim=1)
keep = scores > conf_thresh
boxes_all.append(boxes[keep])
scores_all.append(scores[keep])
labels_all.append(labels[keep])
if boxes_all:
boxes = torch.cat(boxes_all, dim=0)
scores = torch.cat(scores_all, dim=0)
labels = torch.cat(labels_all, dim=0)
keep = batched_nms_xyxy(boxes, scores, labels, iou_thresh=iou_thresh)
outputs.append((boxes[keep], scores[keep], labels[keep]))
else:
outputs.append((torch.zeros((0,4)), torch.zeros((0,)), torch.zeros((0,), dtype=torch.long)))
return outputs
17) mAP Evaluator (core logic)
A correct mAP implementation is long; here is a clean, minimal evaluator approach:
Collect predictions per image: boxes, scores, labels
Collect GT per image: boxes, labels
For each class:
Sort predictions by score
Mark TP/FP using best IoU match above threshold (and only match a GT once)
Compute precision-recall curve
Compute AP by numeric integration
Average across classes → mAP
If you want COCO-style mAP@[.5:.95], repeat the above at multiple IoU thresholds and average.
If you want, I can paste a full, ready-to-run
metrics.pywith mAP@0.5 and COCO mAP in one file (it’s a few hundred lines). For readability here, I’m keeping the main guide focused on the YOLO pipeline.
18) Training on COCO (practical notes)
To train on COCO effectively:
Use a stronger backbone and bigger batch if possible
Use multi-scale training (randomly change input size per batch)
Use warmup for LR in first ~1–3 epochs
Use EMA weights for evaluation
Watch for:
exploding objectness loss (often target assignment bug)
near-zero positives (anchors/strides mismatch)
boxes drifting outside image (decode bug)
19) Training on a custom dataset (the fastest correct workflow)
Pick model input size: 640 is common for a baseline
Convert annotations to absolute XYXY pixels
Visualize boxes on images before training
Start with:
no fancy aug
small model
overfit on 20 images
If it overfits, scale up:
more data
augmentations
better backbone/neck
20) Common bugs checklist (save hours)
Boxes are in wrong format (XYWH vs XYXY)
Boxes normalized but treated as pixels (or vice versa)
Targets assigned to wrong scale (stride mismatch)
Anchor sizes don’t match input size (anchors for 416 but training at 640)
Swapped x/y indexing (gx vs gy in tensor indexing)
Forgot to clamp grid indices
NMS applied before converting to XYXY
mAP evaluation matching multiple preds to the same GT
Implementing YOLO from scratch in PyTorch is one of the best ways to truly understand modern object detection—because you’re forced to connect every moving part: how labels become training targets, how predictions become real boxes, why anchors exist, and what objectness is actually learning.
By the end of this build, you should have a complete, working detector with:
A multi-scale YOLO-style model (backbone + neck + detection heads)
A correct target assignment pipeline (ground-truth → grid cell + anchor)
A stable loss setup (CIoU/GIoU for boxes + BCE for objectness and classes)
A proper inference path (decode → confidence filtering → NMS)
A clear route to production-grade evaluation (mAP@0.5 and COCO mAP@[.5:.95])
A repo structure you can extend into a real project
The most important takeaway is that YOLO isn’t “magic”—it’s a carefully engineered system of consistent coordinate transforms, responsible anchor matching, and balanced losses. If any of those pieces disagree (wrong box format, wrong stride, mismatched anchors, flipped x/y indices), learning collapses. But when everything lines up, the model trains smoothly and scales well.