Introduction
When people hear “AI-powered driving,” many instinctively think of Large Language Models (LLMs). After all, LLMs can write essays, generate code, and argue philosophy at 2 a.m. But putting a car safely through a busy intersection is a very different problem.
Waymo, Google’s autonomous driving company, operates far beyond the scope of LLMs. Its vehicles rely on a deeply integrated robotics and AI stack, combining sensors, real-time perception, probabilistic reasoning, and control systems that must work flawlessly in the physical world, where mistakes are measured in metal, not tokens.
In short: Waymo doesn’t talk its way through traffic. It computes its way through it.
The Big Picture: The Waymo Autonomous Driving Stack
Waymo’s system can be understood as a layered pipeline:
Sensing the world
Perceiving and understanding the environment
Predicting what will happen next
Planning safe and legal actions
Controlling the vehicle in real time
Each layer is specialized, deterministic where needed, probabilistic where required, and engineered for safety, not conversation.
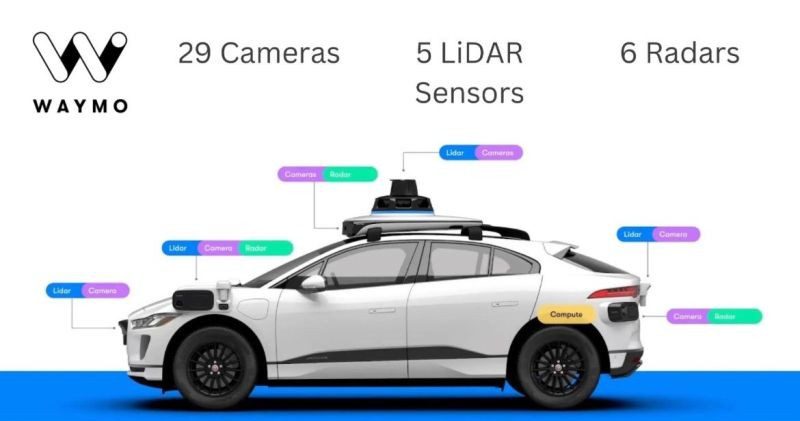
1. Sensors: Seeing More Than Humans Can
Waymo vehicles are packed with redundant, high-resolution sensors. This is the foundation of everything.
Key Sensor Types
LiDAR: Creates a precise 3D map of the environment using laser pulses. Essential for depth and shape understanding.
Cameras: Capture color, texture, traffic lights, signs, and human gestures.
Radar: Robust against rain, fog, and dust; excellent for detecting object velocity.
Audio & IMU sensors: Support motion tracking and system awareness.
Unlike humans, Waymo vehicles see 360 degrees, day and night, without blinking or getting distracted by billboards.
2. Perception: Turning Raw Data Into Reality
Sensors alone are just noisy streams of data. Perception is where AI earns its keep.
What Perception Does
Detects objects: cars, pedestrians, cyclists, animals, cones
Classifies them: vehicle type, posture, motion intent
Tracks them over time in 3D space
Understands road geometry: lanes, curbs, intersections
This layer relies heavily on computer vision, sensor fusion, and deep neural networks, trained on millions of real-world and simulated scenarios.
Importantly, this is not text-based reasoning. It is spatial, geometric, and continuous, things LLMs are fundamentally bad at.
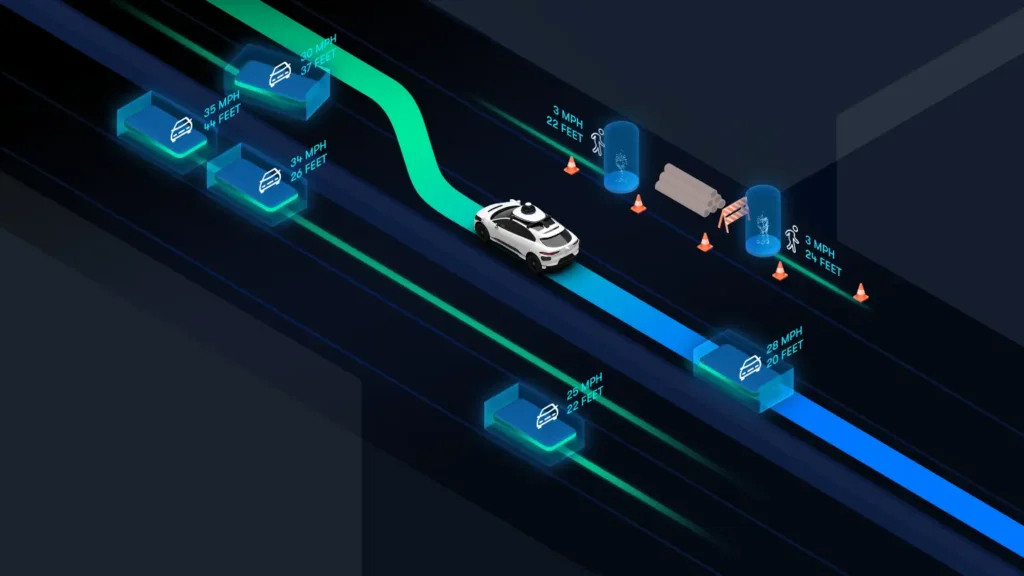
3. Prediction: Anticipating the Future (Politely)
Driving isn’t about reacting; it’s about predicting.
Waymo’s prediction systems estimate:
Where nearby agents are likely to move
Multiple possible futures, each with probabilities
Human behaviors like hesitation, aggression, or compliance
For example, a pedestrian near a crosswalk isn’t just a “person.” They’re a set of possible trajectories with likelihoods attached.
This probabilistic modeling is critical, and again, very different from next-word prediction in LLMs.
4. Planning: Making Safe, Legal, and Social Decisions
Once the system understands the present and predicts the future, it must decide what to do.
Planning Constraints
Traffic laws
Safety margins
Passenger comfort
Road rules and local norms
The planner evaluates thousands of possible maneuvers, lane changes, stops, turns, and selects the safest viable path.
This process involves optimization algorithms, rule-based logic, and learned models, not free-form language generation. There is no room for “creative interpretation” when a red light is involved.
5. Control: Executing With Precision
Finally, the control system translates plans into:
Steering angles
Acceleration and braking
Real-time corrections
These controls operate at high frequency (milliseconds), reacting instantly to changes. This is classical robotics and control theory territory, domains where determinism beats eloquence every time.
Where LLMs Fit (and Where They Don’t)
LLMs are powerful, but Waymo’s core driving system does not depend on them.
LLMs May Help With:
Human–machine interaction
Customer support
Natural language explanations
Internal tooling and documentation
LLMs Are Not Used For:
Real-time driving decisions
Safety-critical control
Sensor fusion or perception
Vehicle motion planning
Why? Because LLMs are:
Non-deterministic
Hard to formally verify
Prone to confident errors (a.k.a. hallucinations)
A car that hallucinates is not a feature.
The Bigger Picture: Democratizing Medical AI
Healthcare inequality is not just about access to doctors, it is about access to knowledge.
Open medical AI models:
Lower barriers for low-resource regions
Enable local innovation
Reduce dependence on external vendors
If used responsibly, MedGemma could help ensure that medical AI benefits are not limited to the few who can afford them.
Simulation: Where Waymo Really Scales
One of Waymo’s biggest advantages is simulation.
Billions of miles driven virtually
Rare edge cases replayed thousands of times
Synthetic scenarios that would be unsafe to test in reality
Simulation allows Waymo to validate improvements before deployment and measure safety statistically—something no human-only driving system can do.
Safety and Redundancy: The Unsexy Superpower
Waymo’s system is designed with:
Hardware redundancy
Software fail-safes
Conservative decision policies
Continuous monitoring
If something is uncertain, the car slows down or stops. No bravado. No ego. Just math.
Conclusion: Beyond Language, Into Reality
Waymo works because it treats autonomous driving as a robotics and systems engineering problem, not a conversational one. While LLMs dominate headlines, Waymo quietly solves one of the hardest real-world AI challenges: safely navigating unpredictable human environments at scale.
In other words, LLMs may explain traffic laws beautifully, but Waymo actually follows them.
And on the road, that matters more than sounding smart.
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.